Hello experts,
We currently are using the TCAN33x series for a 1Mbps 40m CAN bus application. I am new to this project, and I do not believe much time was spent on researching these parts. Not that I believe they are bad parts, but I have been reading the SLLA270 CAN design document, and I’m not convinced that they are the exact part we’d want for our setup.
We have a system that has these specs:
Total desired length: 40m
Desired data rate: 1 Mbps
17 total devices on the bus
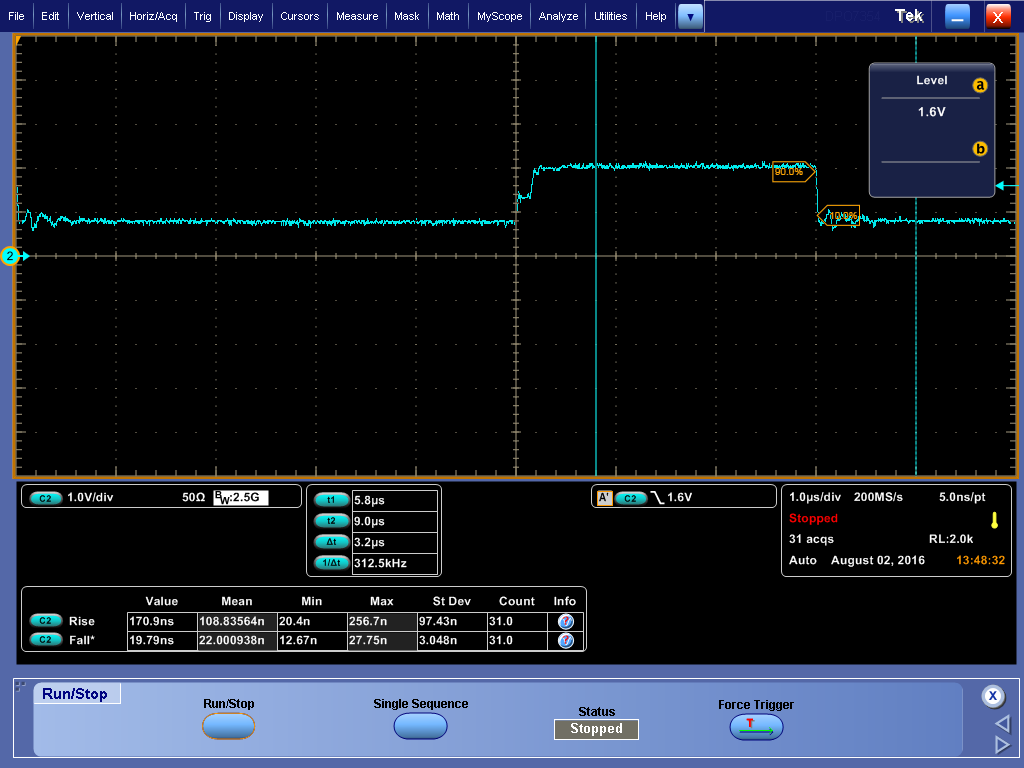
Stub length: .5m (initially we wanted 1m, but I believe this is limited by the rise time of the TCAN33x in our system, measured to be 25 ns)
Cabling: Devicenet cables from Molex, or 22/24 cable from Belden, 120 ohm terminated at the ends of the bus (no split terms or anything exotic)
Transceiver: TCAN33x family (332 or 334, depending on the application) running at 3.3V
The most important specs are the first 3. We can compromise on drop length, I’m currently limiting it to 1/3m, but I think we could go to .5m pretty easily. Right now, we can only get the bus to run at 500 kbps reliably with no errors. If we go to 1 Mbps, then we get lots of passive and active errors (though we still do get data to some degree as well). The errors eat up the bus BW essentially, and I’m sure it’s no good to be running with a lot of errors anyway.
Is there a suggestion from TI on what CAN transceiver you would suggest for this bus setup? Maybe the TCAN should work, but there might be a better option? Would 5V help us in this situation? We’ve had an internal debate about that, but of course, we’d have to add level shifters to interface back to the AM335x.
Any help here would be appreciated. We believe that we can do our proof of concept with the current bus, but for production we likely need to get to 1 Mbps.
Ed Wood
Sr. EE, Product Innovation Center
Nytec, Inc.