Other Parts Discussed in Thread: SN6501
Hi,
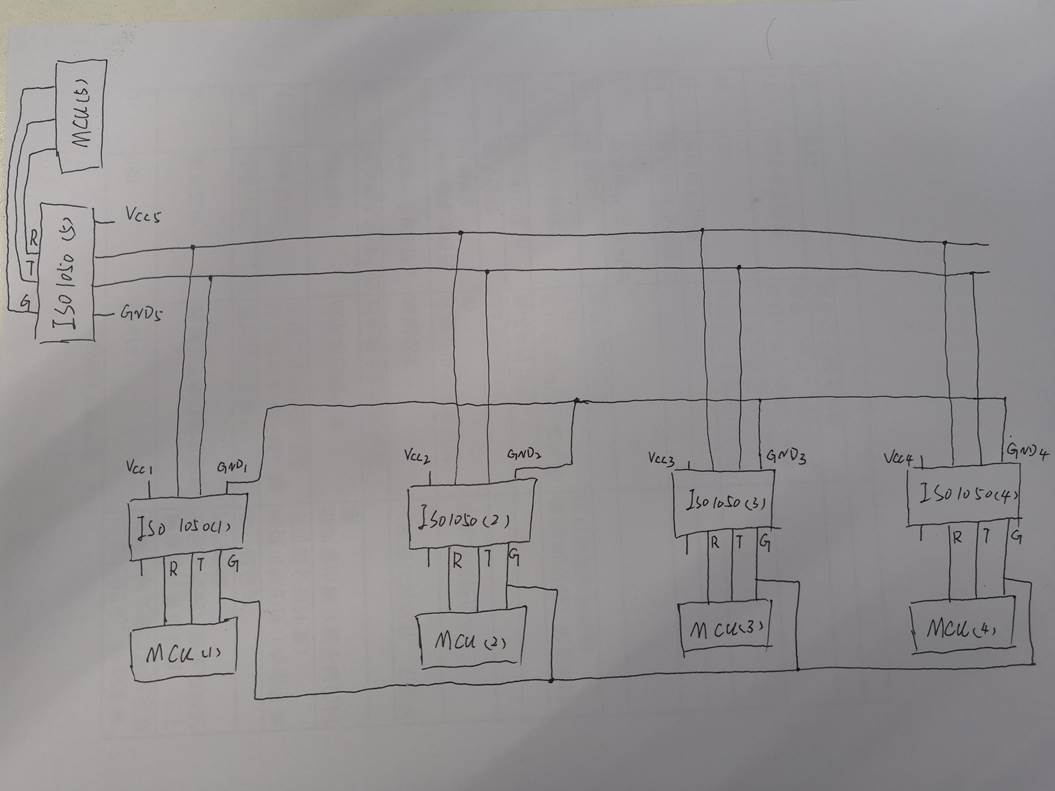
my customer is using our ISO1050 to communicate between one master and four slaves. The four slaves GND are connected together, isolated from the master. The 5 ISO1050 CANH and CANL are connected together.
There is a time that the four ISO1050 of slaves are broken, but the master's ISO1050 is good. The broken part behaves CANH, CANL are shorted to GND2(about 10ohm), and by measuring the diode voltage drop with multimeter, the drop from CANH to VCC2, CANL to VCC2, GND2 to VCC2 are 0.5V.
Then they replace the ISO1050 of 3 slaves. Each slave can communicate with the master. Then they connect one bad slave, 3 good slave, one good master together,
all of the slaves can't communicate with the master. Then they found that all the 3 new ISO1050 are broken again. The same behavior as I described before.
They customer's main concern is why the broken device can cause the good device on the same CAN bus break.