


Part Number: TCAN1043-Q1
Other Parts Discussed in Thread: TCAN1043
Hello,
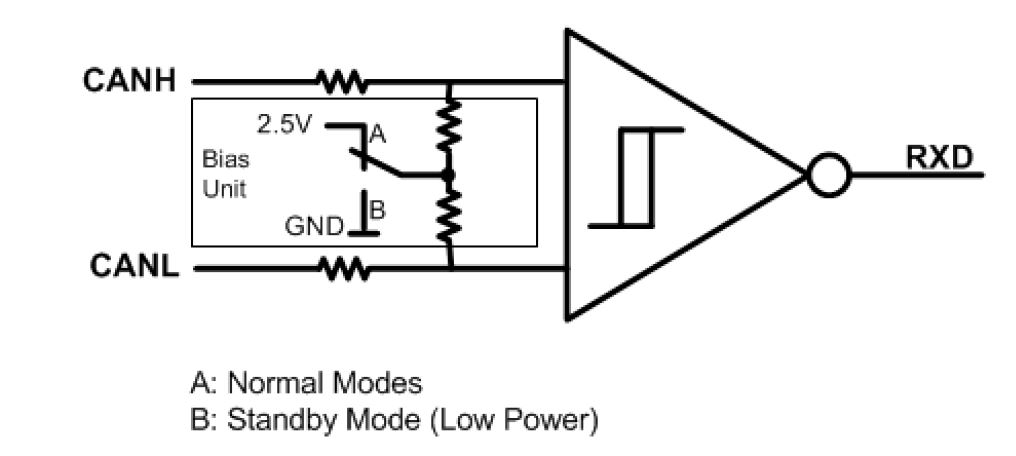
Does TI have any CAN transceivers with the low power mode that both driver and receiver are turned off and the bus is not pulled down? For TCAN1043, it seems that the silent/standby/sleep mode all cannot meet my requirement.
Here is what I need to do. I am going to use several CAN transceivers on one CAN bus. But not all the devices are going to work at the same time. Sometimes just one of the device needs to work. For the other devices, the receiver should be disabled. But meanwhile, the CAN bus cannot be pulled down (which is standby mode as far as I understand). Is there any way to realize this?
Thanks in advance!


{kind=link}
{kind=link}