


Hi Team,
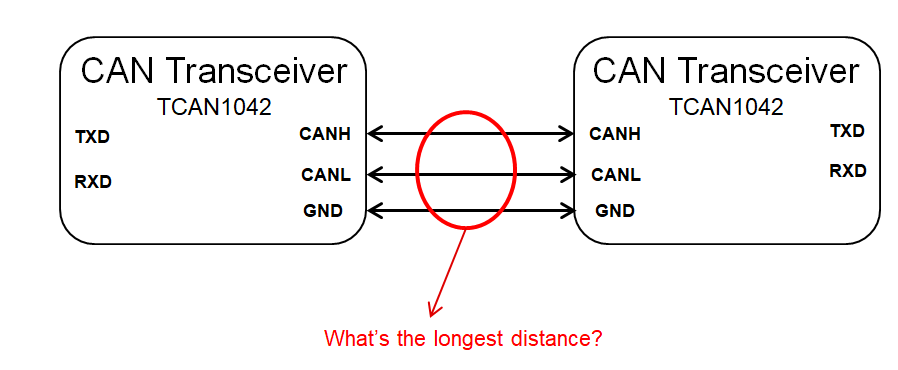
I would like to know how to decide the longest distance to transmit the CAN differential signal. Is there any specification or recommendation for the transmission distance? From my understanding the distance may be different depends on the type of cable/wire used. It will be great if there is exiting document or guide to help to decide the distance.
Thanks and best regards,
Felix
