


Part Number: SN65HVD234
Hi
I want to have CAN network of 64 nodes with minimum possible overall current consumption using SN65HVD234.
The idea is to keep all devices in standby and enable one driver only. My problem is how to enable driver.
Bus speed is 50kbps, with bit time 20us. Driver goes from standby to dominant within max. 1,5us, seems enough.
How fast goes back to standby?
Here's what I tested till now:
1. Usually there's no 'RX byte' interrupt in controller, only after RX whole frame, but it's too late for driving ACK to the bus.
2. I don't want to enable all transceivers from beginning of each frame, because I need to do it in all nodes and overall current consumption increases too much.
3. I didn't found CAN controllers with dedicated standby pin, do they exist? So the idea is to control Rs pin from TX of controller like this (modified example from DS):
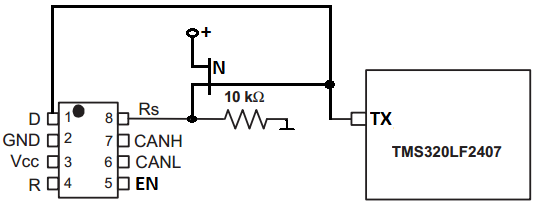
When TX is low, D is dominant, N FET is disabled and Rs is connected to 10k to ground (slope control).
When TX goes high, S is recessive, N pulls Rs high and transceiver goes standby.
Is my understanding correct?


