Part Number: AM26C31
Other Parts Discussed in Thread: AM26C32
Hi,
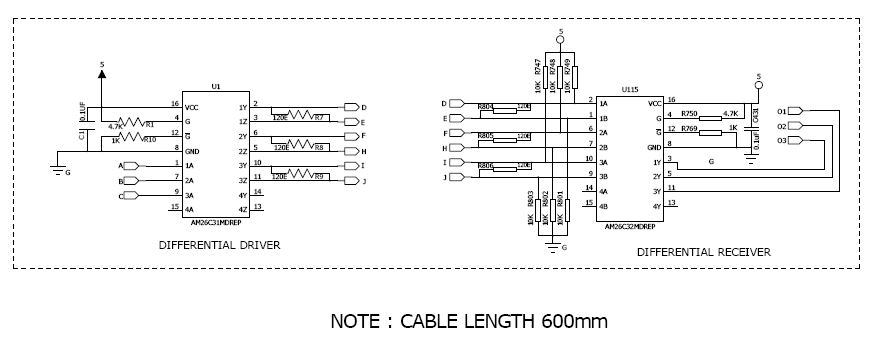
I am using AM26C31MDREP as a differential driver and AM26C32MDREP as a differential receiver, With 5V single-ended signal input for AM26C31MDREP and expected 5V single-ended output from AM26C32MDREP. Can anyone let me know what are the recommended resistors and capacitors required for the above configuration, the cable length between differential drive and receiver will be maximum of 600mm. Please post any reference design.
With regards,
Sivakrishna