


Part Number: TCAN4550
Hi,
currently we are performing a compare test between TCAN4550 and competitor's MCP2517FD-H/JHA + MCP2542WFDT-E/MF combination.
Both, TCAN and MCP are connected on the same CAN BUS. We have noticed something very strange, if the competitors CAN PHY is disabled, the signal on the BUS goes crazy if TCAN trys to send something.
Figure1: both CAN PHYs, TCAN and MCP are active, and TCAN send test mesage (the CAN BUS is very short, ~50 cm and it was unterminated at both ends).
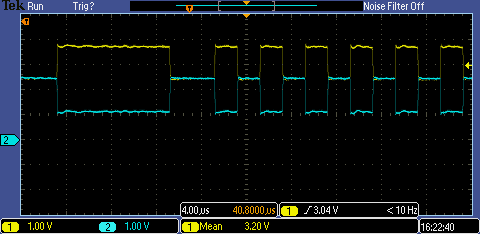
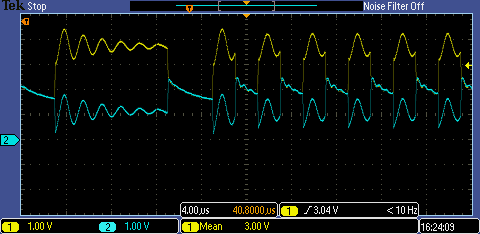
Figure 2: the MCPs CAN PHY is disabled, (Pin EN is high) and TCAN trys to send a test message (the CAN BUS is very short, ~50 cm and it was unterminated at both ends).
Unfortunately, we haven't managed to make third case where TCAN internal PHY will be disabled , in order to see, what's going on if MCPS CAN PHY trys to send a test message.
The TCAN is controlled over SPI from Linux running on the Sitara processor.
Q1: What would be the easiest way to disable TCAN PHY and set pins 10, 11 to high-impedance state?
Q2: Do you have maybe any hint, why does the signal has a lot of ringings?
If the schematic will be needed, I can share it over our local TI's office in our country.
Br,
Josko

