Other Parts Discussed in Thread: MSP430FR6989, TCAN4550
Hi Team,
I would like test TCAN4550 CAN function, thus I would to use MSP430FR6989 to connect with it for testing.
I have 2 FR6989 + 2 TCAN4550 EVM.
The connection is shown below:
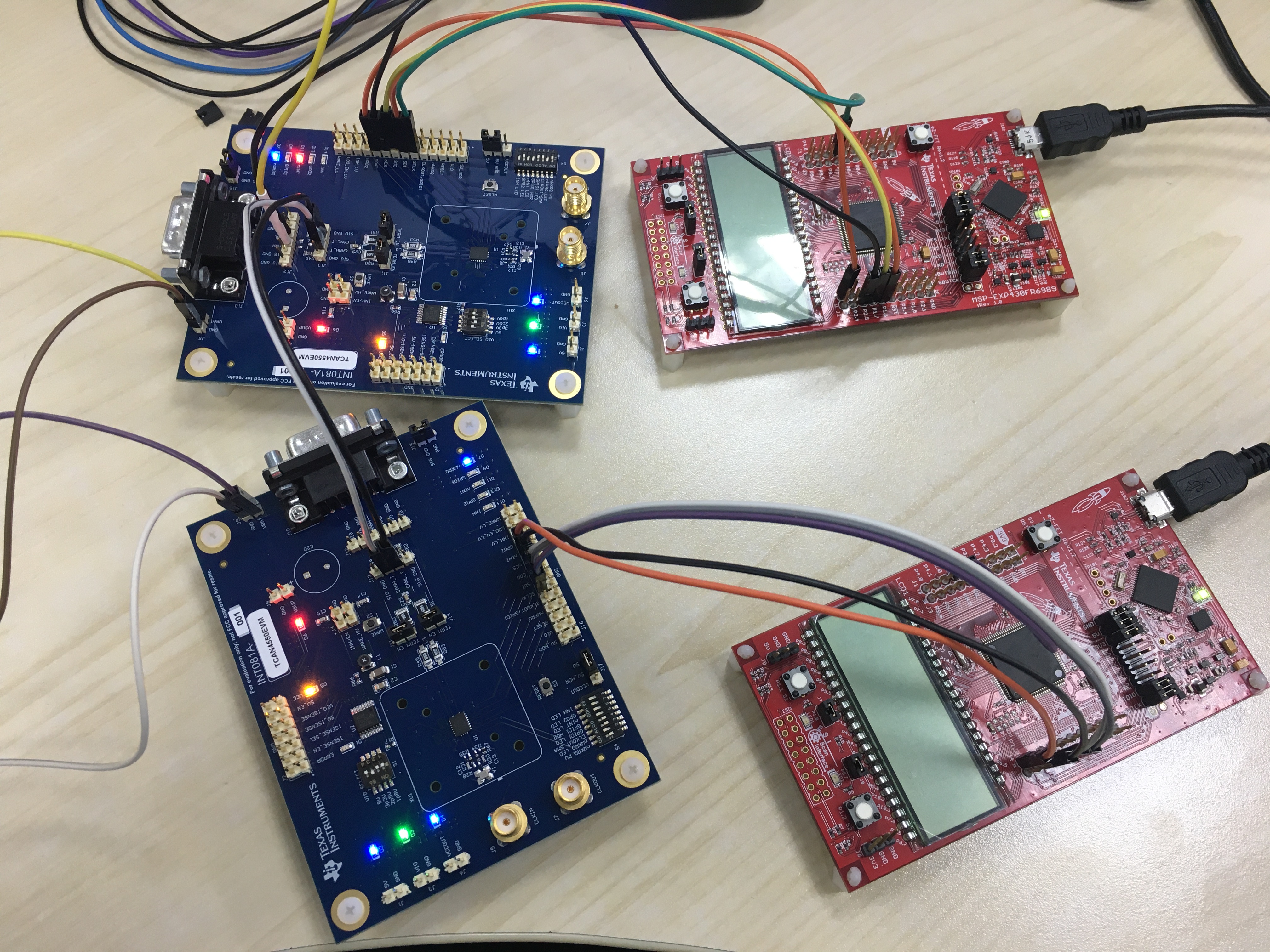
Power supply : DC - 12V
Demo: TCAN455x Driver Library Demo (Rev. A)
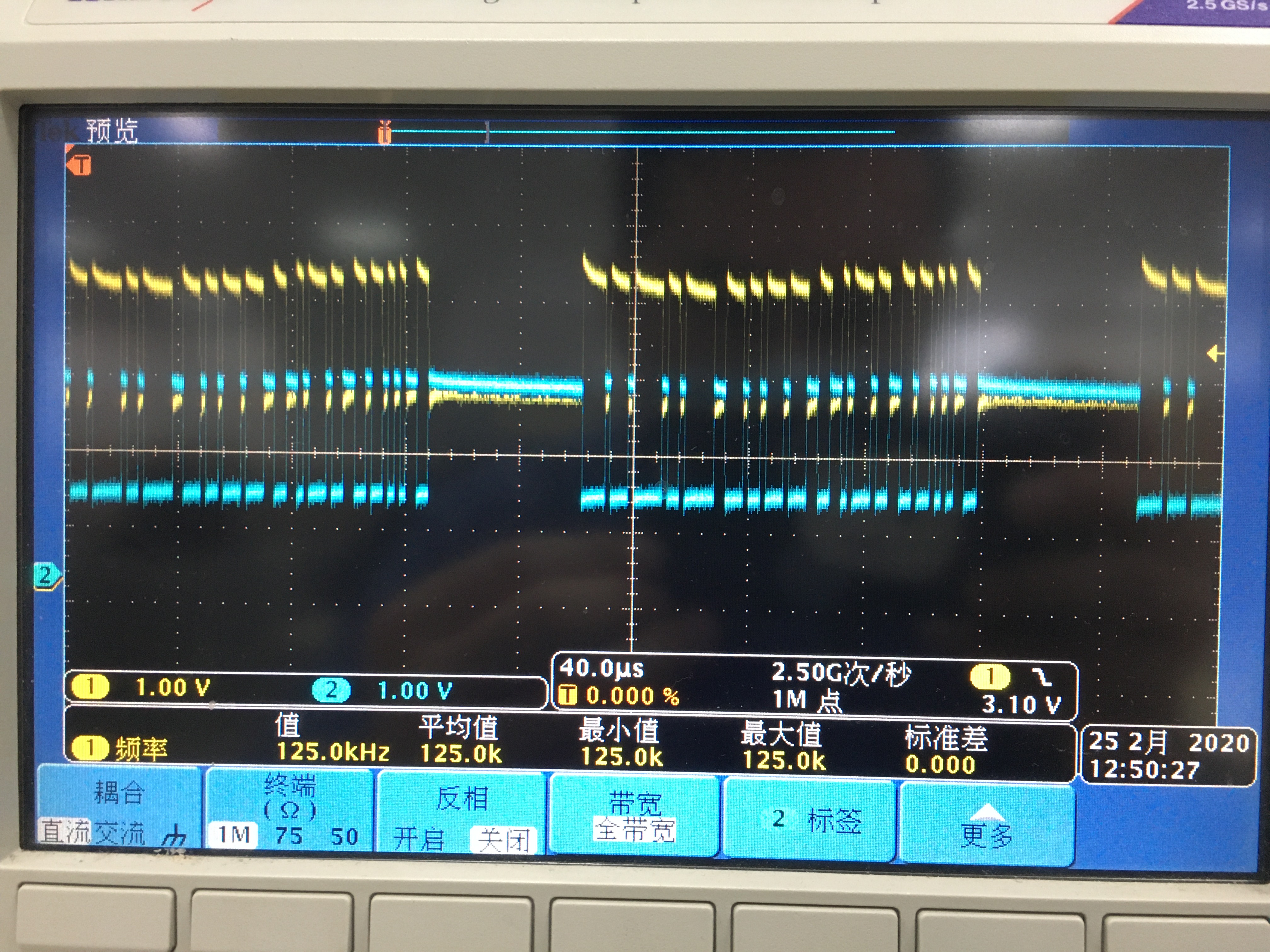
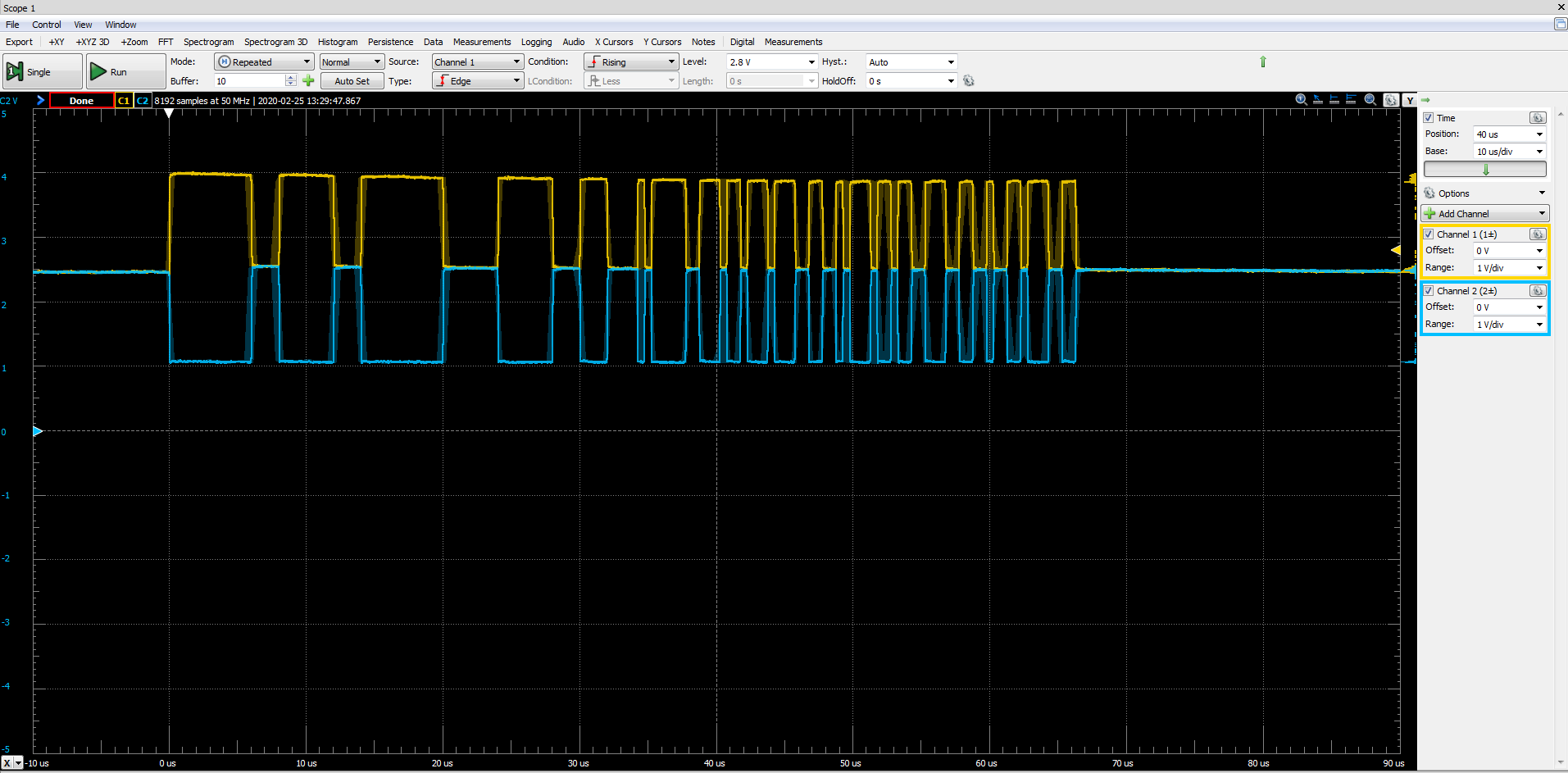
When pressing the S1 button (sending CAN data) at one MCU, the other MCU did not receive the corresponding interrupt, and I used a logic analyzer to monitor the CAN Bus waveform, and there was no waveform.
Where am I connected wrong on the hardware? Or do I need to make other settings?
Please help me.
Best Regards
Johnson