Part Number: TCAN4550
Hi,
We are using TCAN4550 for our project on a custom board. Setup is like this, one board is sending data, another is listening.
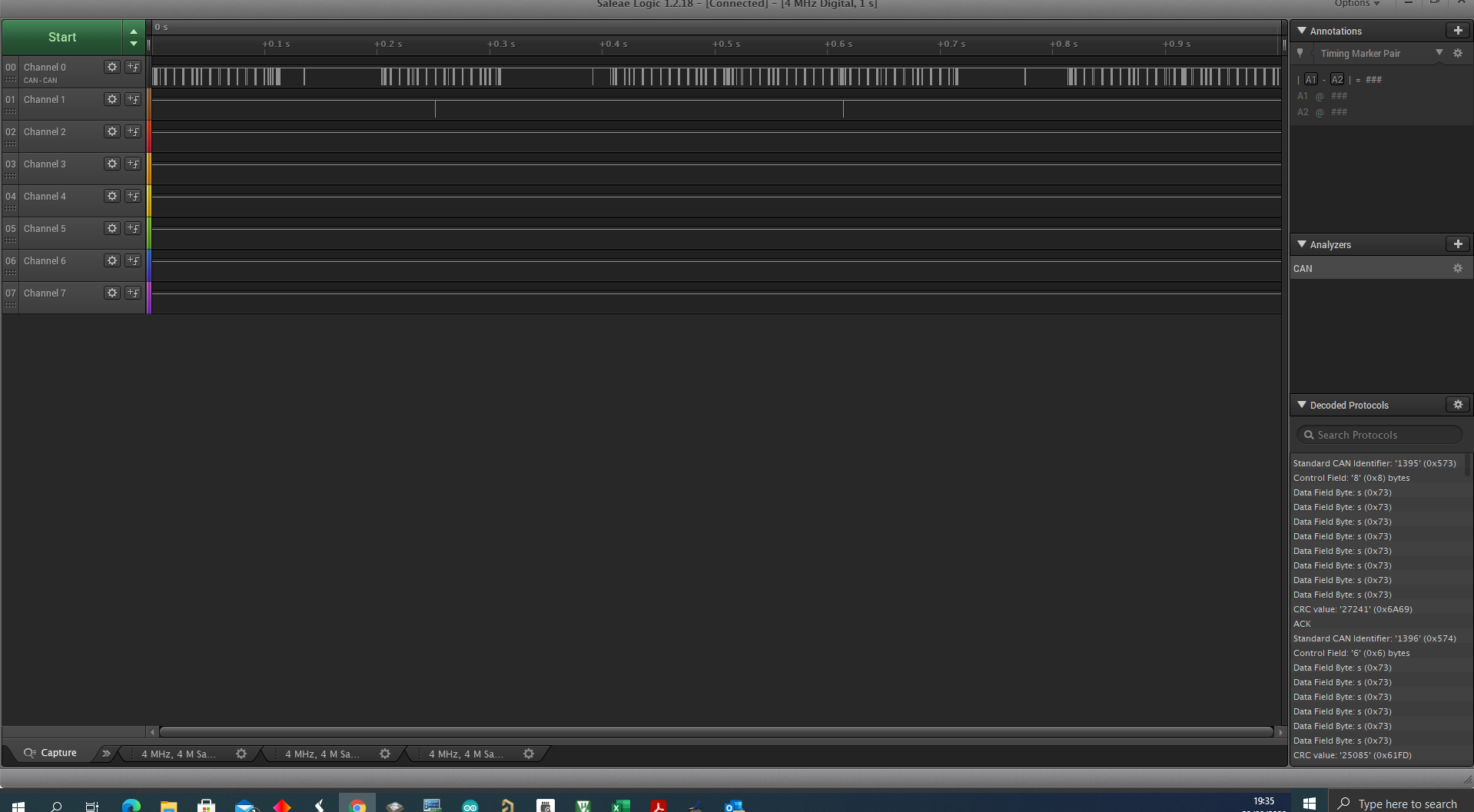
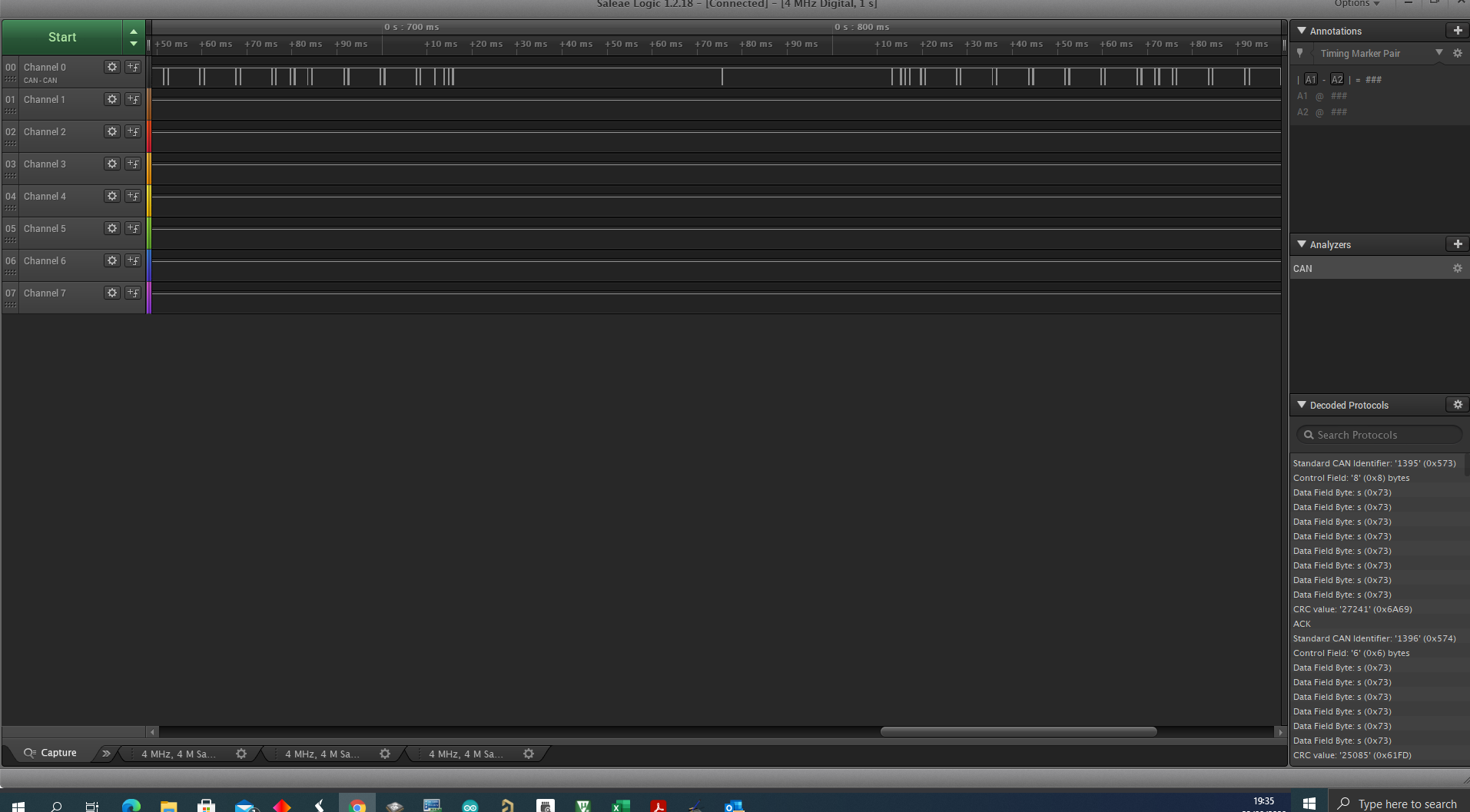
So the board which is sending expects ACK data. But there lies an issue. When the receiver gets the data it should send ACK back immediately but it usually sends it in the range of 90-100ms which is too much.
So communication is working perfectly, if I look at register status everything is clear except GLOBALERR, i don't know if this has anything to do with it.
Code is created based on your example. (TCAN4550_DEMO).
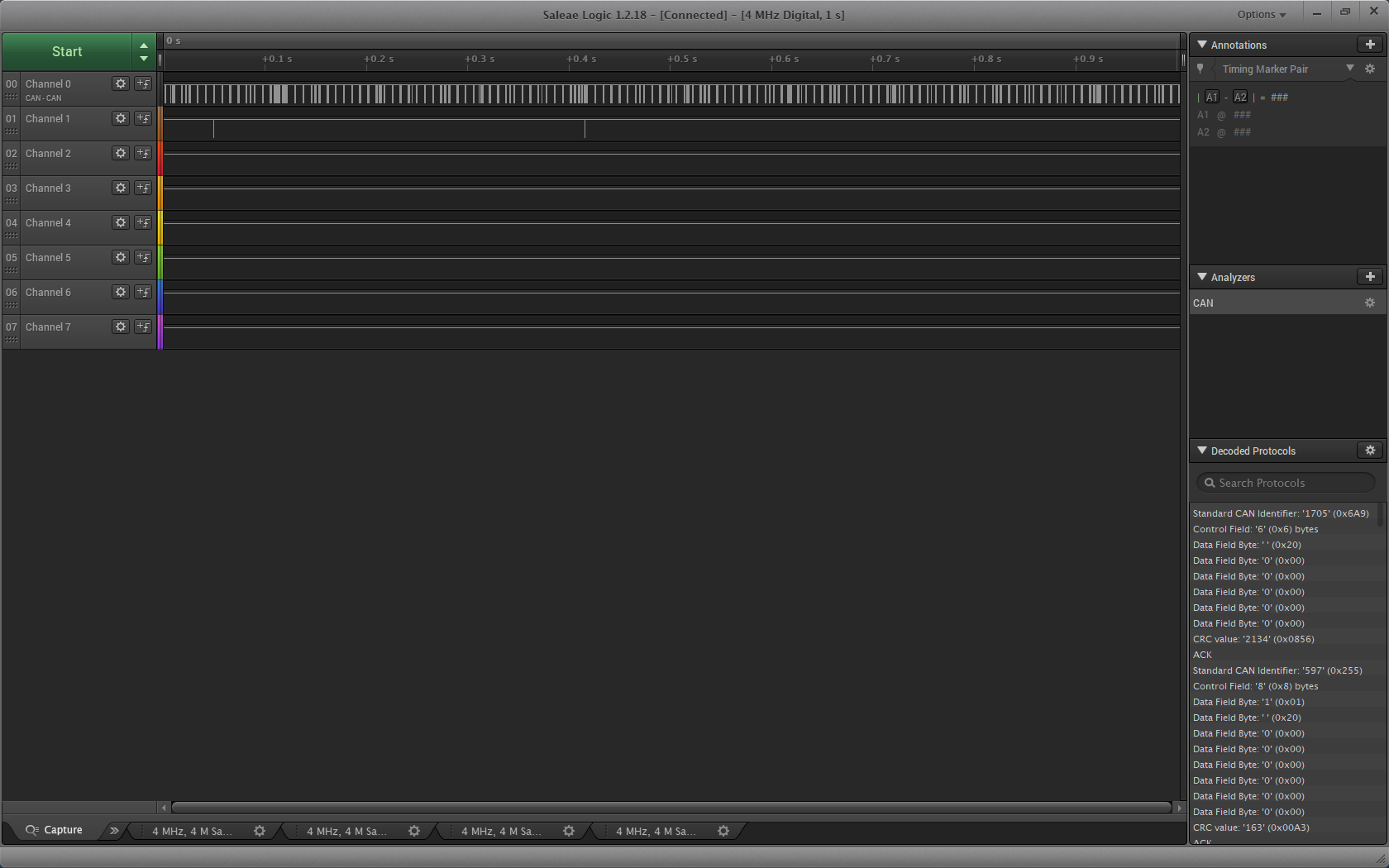
if (MsgHeader.ID == 0x6A9) // Example of how you can do an action based off a received address
{
if(rx_data[0] == 0x10)
{
speed = ( rx_data[3] << 8 ) | rx_data[2];
header.ID = 0x255;
tx_data[0] = 0x01;
tx_data[1] = 0x10;
tx_data[2] = 0x00;
tx_data[3] = 0x00;
tx_data[4] = 0x00;
tx_data[5] = 0x00;
tx_data[6] = 0x00;
tx_data[7] = 0x00;
TCAN4x5x_MCAN_WriteTXBuffer(0, &header, tx_data); // This line writes the tx_data and header to TX FIFO 1
TCAN4x5x_MCAN_TransmitBufferContents(0); // Request that TX Buffer 1 be transmitted
}
}
Can you please help me why is there such a delay, and what means GLOBALLERR?
Thank you
Seba.