Part Number: TCAN4550-Q1
Other Parts Discussed in Thread: TCAN4550EVM, TCAN4550
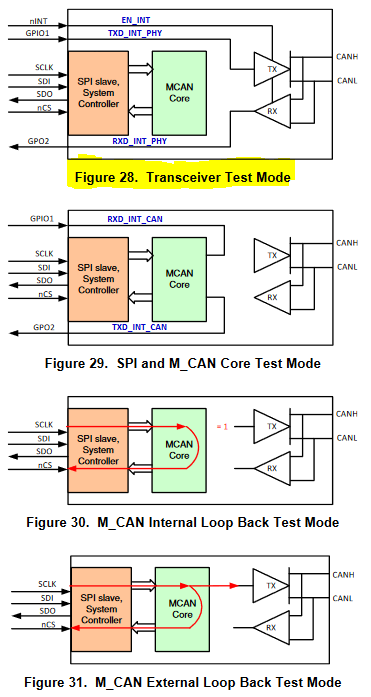
I enable the GPIO1 and GPO2 as RXD_INT_CAN and TXD_INT_CAN by adding TCAN4x5x_Device_EnableTestMode(TCAN4x5x_DEVICE_TEST_MODE_PHY).
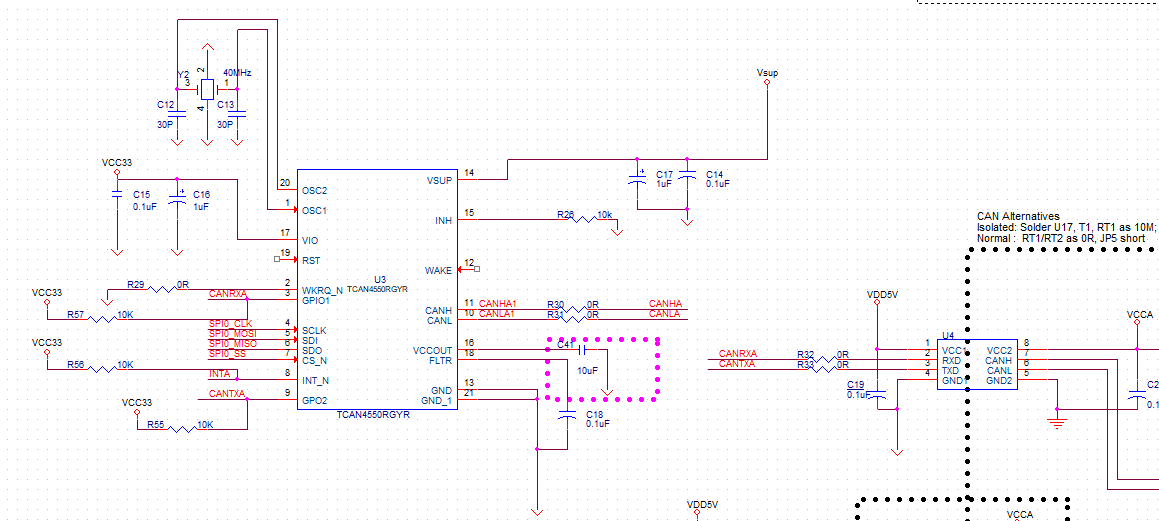
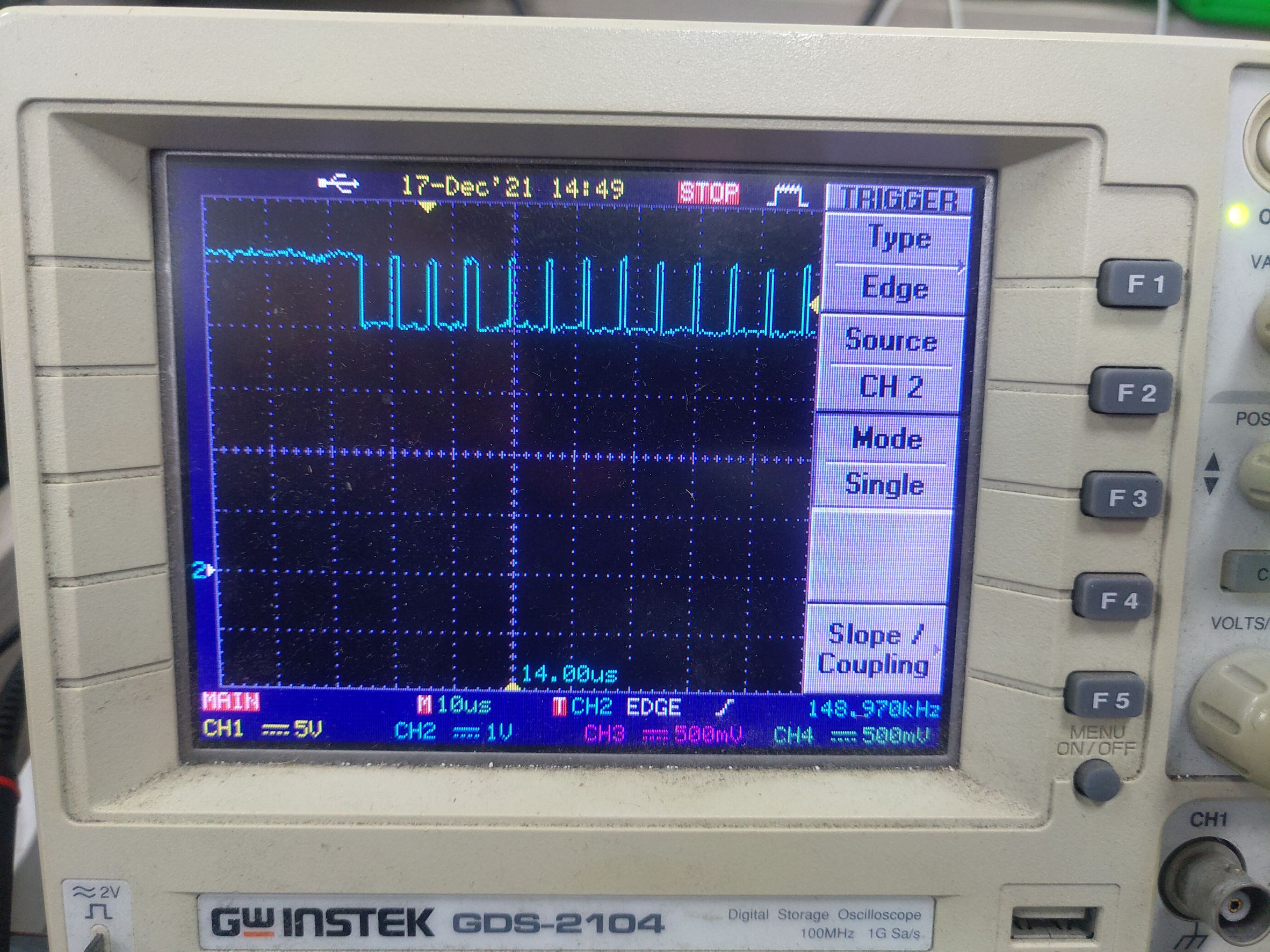
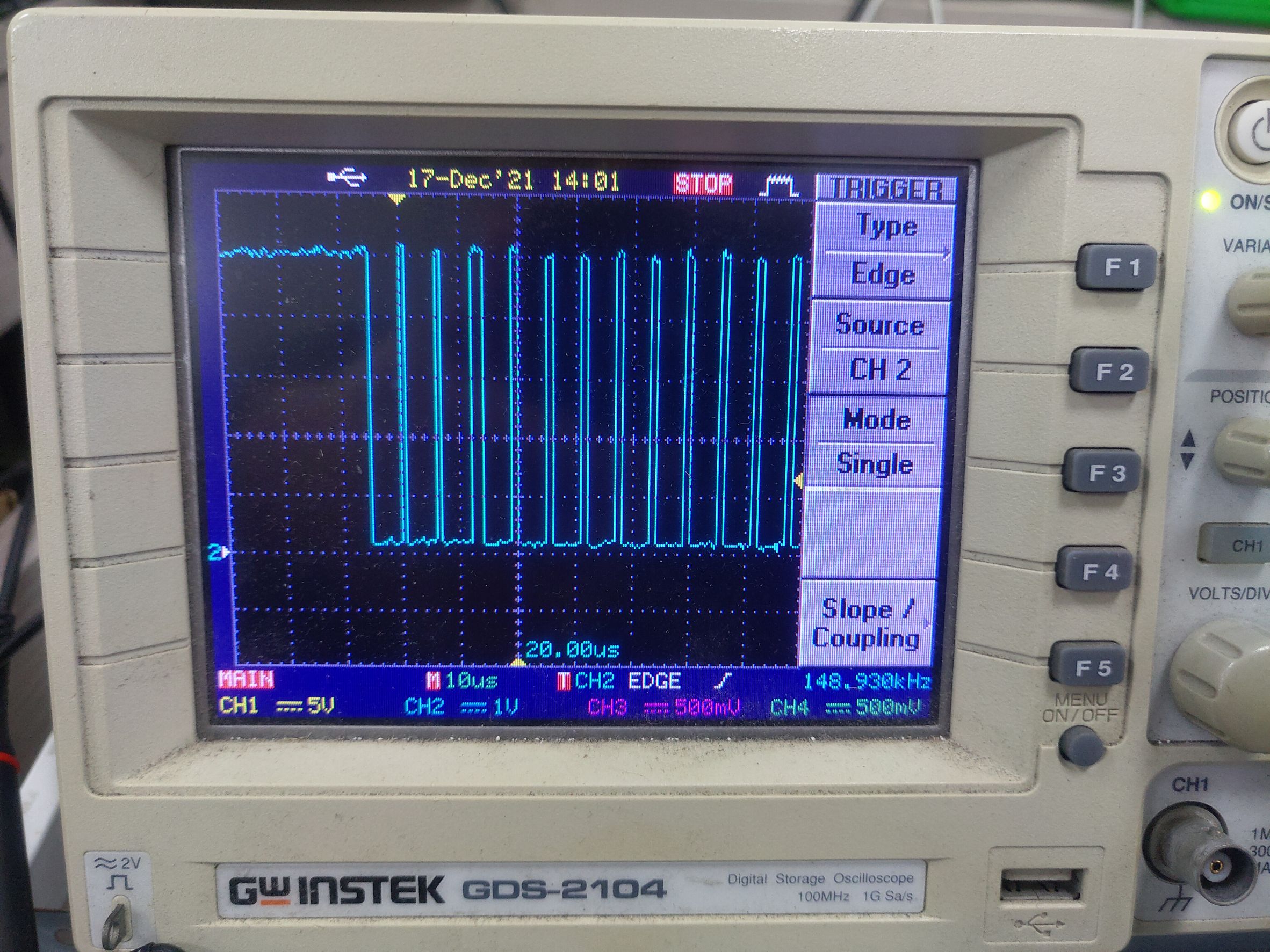
I have test it on the TCAN4550EVM. So I made a pcb to test it, but the RXD_INT_CAN and TXD_INT_CAN doesn't have any signal.
Do you have any idea about this?