Part Number: TCAN332
Hi team,
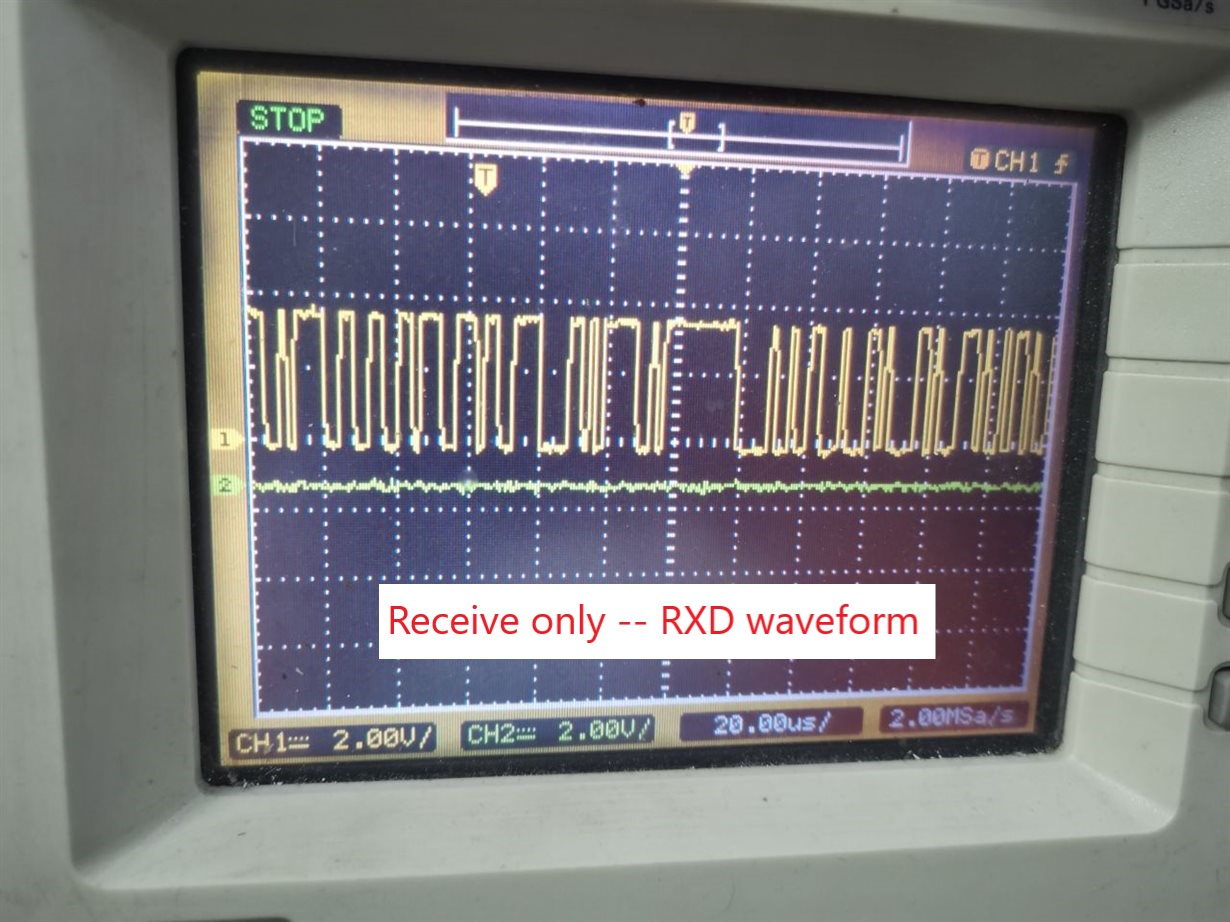
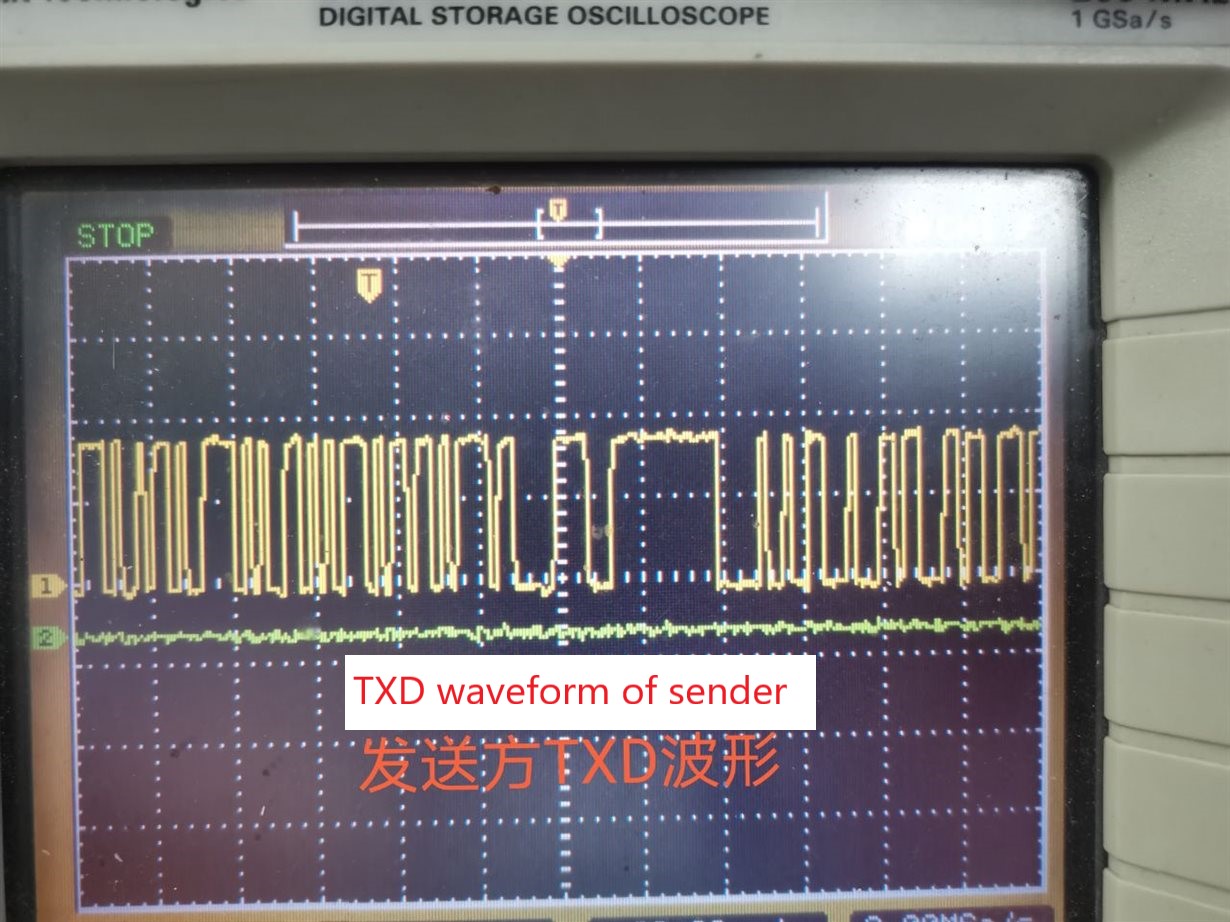
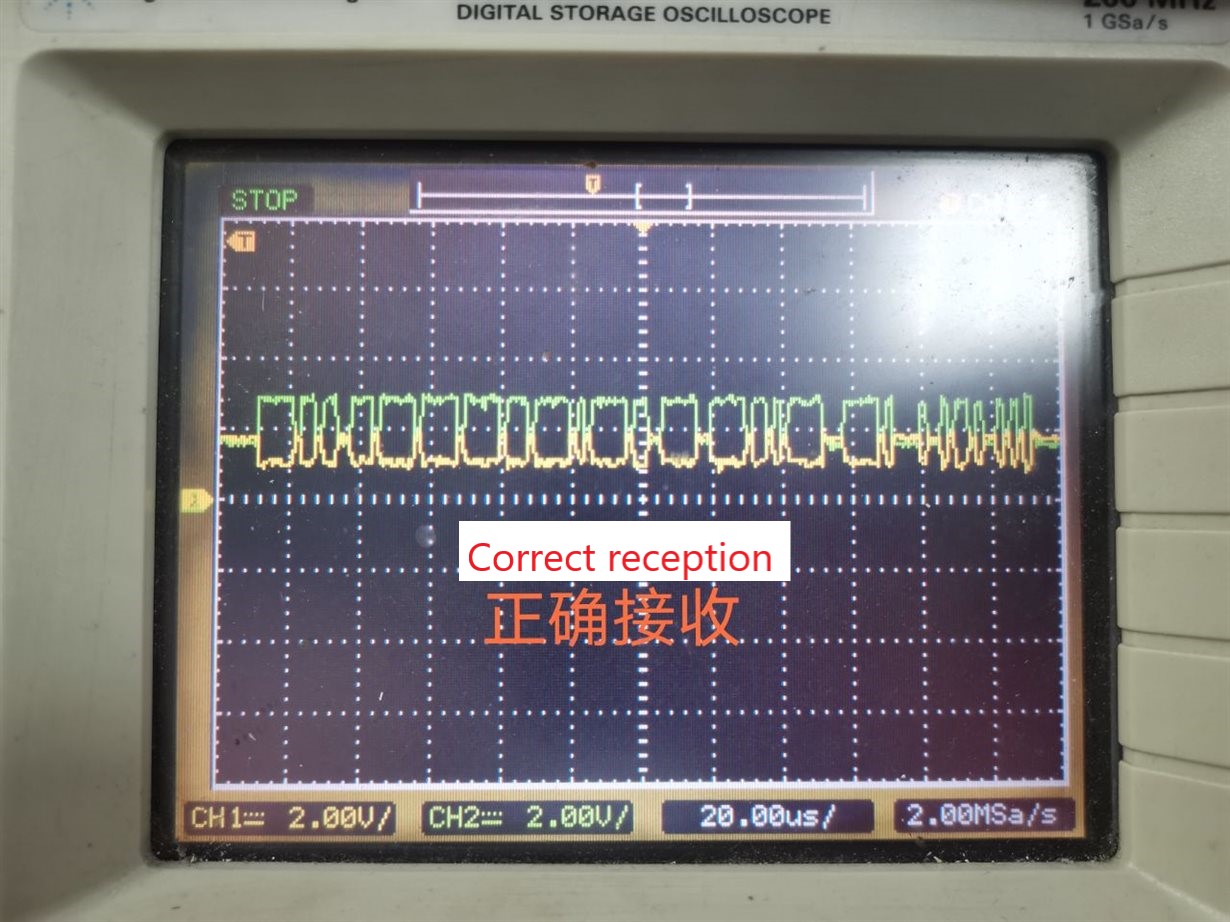
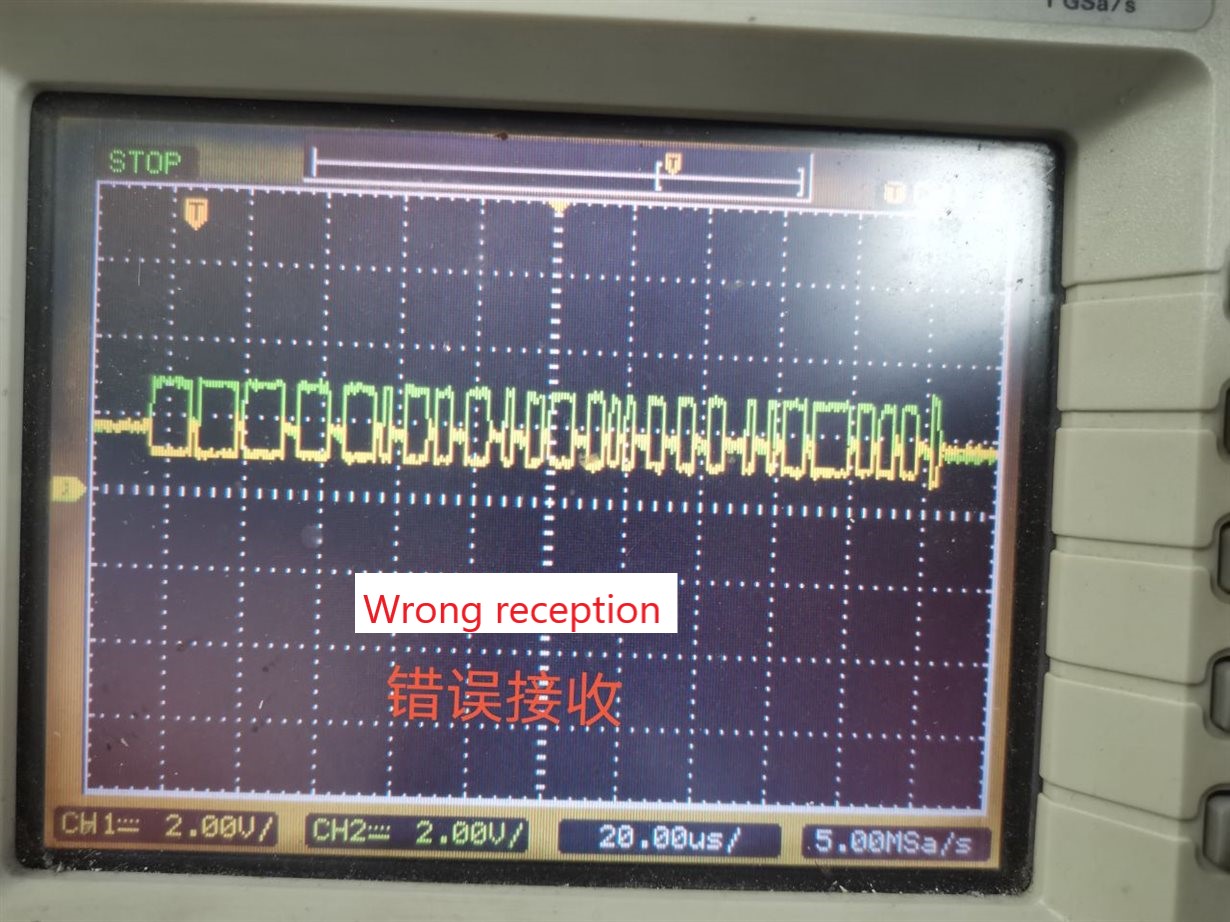
TCAN332D will lose data when transmitting and receiving at the same time.
If Party A sends and Party B receives, the data will not be lost. If Party A and Party B send and receive at the same time, the data will be lost.
Is it because TCAN332D can't communicate in full duplex? Or something else?