


Part Number: TPS65987D
I am having issues getting the EVM to go into patch mode so that I could follow the flow chart in the SLVA972A manual.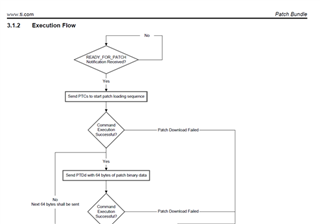
So I have tried sending the 4cc command to reset the patch with the proper key and I don’t seem to get the system to react to it. It accepts the command, and reports everything is fine but the mode(0x03) stays in APP and I never read the READY_FOR_PATCH in the 0x14 reg. I have attached the driver I wrote to talk to the pd controller. Also attached is the config array that I got from the app customization tool. In the main() I have a serial interface running that when I send a command to send the patch it will call
Reset_Patch();
Apply_Patch();
Let me know if this is something you can help me with or if I must submit it to the E2E forum.
I am using a saleae logic to monitor the i2c lines to make sure that the pd controller is ack and returning the proper bytes and that my code receive them. I know that some of the 4cc commands have return bytes that I currently don’t handle in code but I was just monitoring it in saleae for simplicity.
/*
* TPS6598.c
*
* Created: 3/2/2021 1:49:16 PM
* Author: carlson.magina
*/
#include "TPS6598.h"
#include "string.h"
extern const char tps6598x_lowregion_i2c_array[];
extern int gSizeLowregionArray ;
#define TPS6598_I2C_Addr 0x38
#define MaxBufferSize 128
uint8_t temp_readbuf[MaxBufferSize];
uint8_t temp_writebuf[MaxBufferSize];
#define TIMEOUT_TIME 500 //ms
#define MAXPATCHSIZE 64 //bytes
//registers
#define MODE_reg 0x03
#define CMD1_reg 0x08
#define DATA1_reg 0x09
#define IntEvent1_reg 0x14
#define IntMask1_reg 0x16
void MASTER_i2C_restart_PD_controller_ic (void)
{
i2c_m_sync_disable(&I2C);
gpio_set_pin_direction(HUB_SDA, GPIO_DIRECTION_IN);
gpio_set_pin_function(HUB_SDA, GPIO_PIN_FUNCTION_OFF);
gpio_set_pin_direction(HUB_SCL, GPIO_DIRECTION_OUT);
gpio_set_pin_level(HUB_SCL,1);
gpio_set_pin_function(HUB_SCL, GPIO_PIN_FUNCTION_OFF);
while (!gpio_get_pin_level(HUB_SDA))
{
for (uint8_t i=0; i<9; i++)
{
gpio_set_pin_level(HUB_SCL,0);
gpio_set_pin_level(HUB_SCL,1);
}
}
I2C_PORT_init();
i2c_m_sync_enable(&I2C);
// i2c_m_sync_send_stop(&I2C);
}
void readPDmem (uint8_t regaddr, uint8_t* readbuf,uint8_t numBytes)
{
int32_t ret_stat;
if (MaxBufferSize<(numBytes+1))
{
//error
return;
}
//stopless write
struct _i2c_m_msg msg;
msg.addr = TPS6598_I2C_Addr;
msg.len = 1;
msg.flags = 0;
msg.buffer = ®addr;
ret_stat=i2c_m_sync_transfer (&I2C,&msg);
msg.addr = TPS6598_I2C_Addr;
msg.len = numBytes+1;
msg.flags = I2C_M_RD | I2C_M_STOP ;
msg.buffer = (uint8_t *)temp_readbuf;
ret_stat=i2c_m_sync_transfer (&I2C,&msg);
if (ret_stat==0)
{
memcpy(readbuf,&temp_readbuf[1],numBytes);
}
else if (ret_stat==-4)
{
sys_info.I2C_faults++;
ret_stat=0;//error
MASTER_i2C_restart_PD_controller_ic();
}
else if (ret_stat==-5)
{
sys_info.I2C_faults++;
ret_stat=0;//error
MASTER_i2C_restart_PD_controller_ic();
}
else
{
sys_info.I2C_faults++;
ret_stat=0;//error
}
}
void writePDmem(uint16_t regaddr, uint8_t *wrbuf, uint8_t numBytes)
{
int32_t ret_stat;
i2c_m_sync_set_slaveaddr(&I2C, TPS6598_I2C_Addr, I2C_M_SEVEN);
if (MaxBufferSize<(numBytes+2))
{
//error
return;
}
temp_writebuf[0]=regaddr;
temp_writebuf[1]=numBytes;
memcpy(&temp_writebuf[2],wrbuf,numBytes);//set host timeout to 5 seconds
ret_stat=io_write(&I2C.io, temp_writebuf,numBytes+2);
//excute comand
if (ret_stat==numBytes+1)
{
//*readbuf=hub_readbuf[1];
}
else if (ret_stat==-4)
{
sys_info.I2C_faults++;
ret_stat=0;//error
MASTER_i2C_restart_PD_controller_ic();
}
else if (ret_stat==-5)
{
sys_info.I2C_faults++;
ret_stat=0;//error
MASTER_i2C_restart_PD_controller_ic();
}
else
{
sys_info.I2C_faults++;
ret_stat=0;//error
}
}
bool setupIntMask()
{
uint8_t registerBytes[11];
registerBytes[0]=0xff;
registerBytes[1]=0xff;
registerBytes[2]=0xff;
registerBytes[3]=0xff;
registerBytes[4]=0xff;
registerBytes[5]=0xff;
registerBytes[6]=0xff;
registerBytes[7]=0xff;
registerBytes[8]=0xff;
registerBytes[9]=0xff;
registerBytes[10]=0xff;
writePDmem(IntMask1_reg,registerBytes,11);
readPDmem(IntMask1_reg,registerBytes,11);
//Patch Status stored in byte 11 bit 1
if (registerBytes[10] & 0x02)
{
//continue
}
else
{
return false;
}
return true;
}
bool isReadyforPatch ()
{
uint8_t registerBytes[11];
readPDmem(IntEvent1_reg,registerBytes,11);
readPDmem(MODE_reg,registerBytes,4);
//Patch Status stored in byte 11 bit 1
if (registerBytes[10] & 0x02)
{
return true;
}
else
{
return false;
}
}
bool Send4ccCmd (char* CC4_cmd, uint8_t DataBytes, uint8_t *data, uint8_t receiveBytes, uint8_t* receiveData)
{
if (DataBytes>0)
{
//send data if neccesary
if (data==NULL)
{
//error null pointer to data
return false;
}
writePDmem(DATA1_reg,data,DataBytes);
}
//send command
writePDmem(CMD1_reg,(uint8_t*)CC4_cmd,4);
//check for command execution success
uint8_t commandsuccess[4];
for (uint8_t i=0; i<10; i++) //try four times
{
readPDmem(CMD1_reg,commandsuccess,4);
if ((*((uint32_t *)commandsuccess))==0)
{
break;
//command success
//continue
//return true;
}
else if ( commandsuccess[0] == CC4_cmd[0] && //
commandsuccess[1] == CC4_cmd[1] && //
commandsuccess[2] == CC4_cmd[2] && //
commandsuccess[3] == CC4_cmd[3] )
{
//waiting for command to finish
delay_ms(1);
}
else if ( commandsuccess[0] == '!' && //
commandsuccess[1] == 'C' && //
commandsuccess[2] == 'M' && //
commandsuccess[3] == 'D' )
{
//command not recognized
//error
return false;
}
else
{
//unknown
delay_ms(1);
return false;
}
delay_ms(1);
}
if (receiveBytes>0)
{
//send data if neccesary
if (data==NULL)
{
//error null pointer to data
return false;
}
readPDmem(DATA1_reg,receiveData,receiveBytes);
}
return true;
}
bool Reset_Patch()
{
isReadyforPatch();
uint8_t data[4];
data[0]= 0x01;
data[1]= 0x00;
data[2]= 0xBE;
data[3]= 0xEF;
return Send4ccCmd("PTCr",4,data,1,data);
}
bool Apply_Patch()
{
uint16_t timeout = 0;
uint8_t rtnData[10];
setupIntMask();
while(!isReadyforPatch())
{
delay_ms(1);
timeout++;
if (timeout>TIMEOUT_TIME)
{
//failed to get ready in reasonable amount of time
return 0;
}
}
uint8_t data[4];
data[0]=0x02;
Send4ccCmd("PTCs",1,data,4,rtnData);
uint32_t numBytesSnt =0,numBytesRem = 0;
uint8_t bytes2Snd =0;
uint8_t * dataAddr = NULL;
numBytesRem=gSizeLowregionArray;
while (numBytesRem)
{
if (numBytesRem>MAXPATCHSIZE)
{
bytes2Snd=MAXPATCHSIZE;
}
else
{
bytes2Snd=(uint8_t)numBytesRem;
}
dataAddr= (uint8_t *)&(tps6598x_lowregion_i2c_array[numBytesSnt]);
if (!Send4ccCmd("PTCd",bytes2Snd,dataAddr,10,rtnData))
{
//failed sending data
return false;
}
numBytesSnt=numBytesSnt+bytes2Snd;
numBytesRem=numBytesRem-bytes2Snd;
}
if (!Send4ccCmd("PTCc",0,NULL,4,rtnData))
{
//failed sending data
return false;
}
return true;
}
