Part Number: TCAN1051V-Q1
Other Parts Discussed in Thread: TCAN1051, SN65HVD230
hi,
I encountered an issue where the TI TCAN 1051 is interfering with the CAN bus. Below is the test setup:
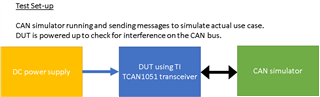
This was simulated by connecting an unpowered DUT where the TCAN1051 transceiver is used to a powered CAN simulator. In this scenario, the CANH and CANL signals are within the specifications.

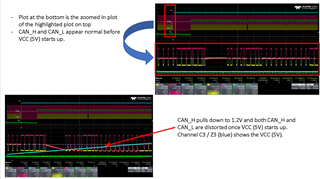
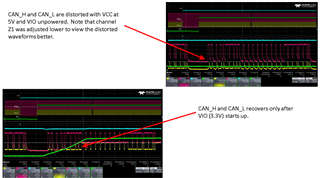
The DUT was then powered where the 5V is powered first before the 3.3V and the CANH and CANL are pulled low which will affect the messages that the other devices connected on the CAN bus will read.

The CAN transceiver, TCAN1051 should not be pulling the bus below its specification.

Please advice what is the reason the CAN BUS behave this way? (e.g pulled low from 2.5V to 1.2V???)
Best regards,
Felix