Part Number: ISO1050
Tool/software:
Hi there,
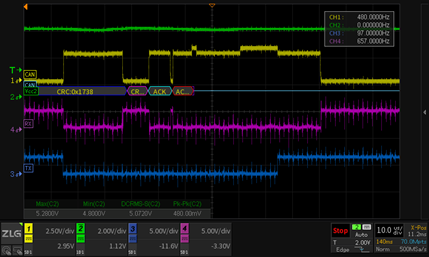
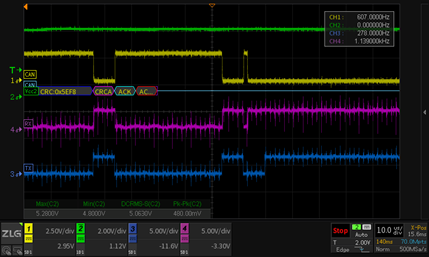
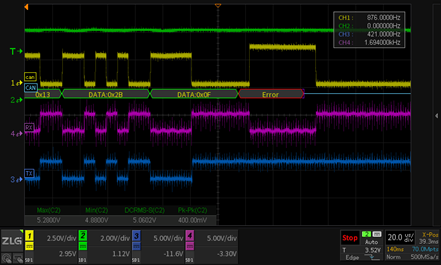
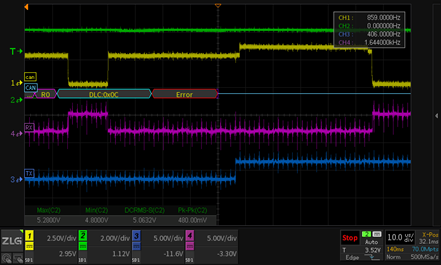
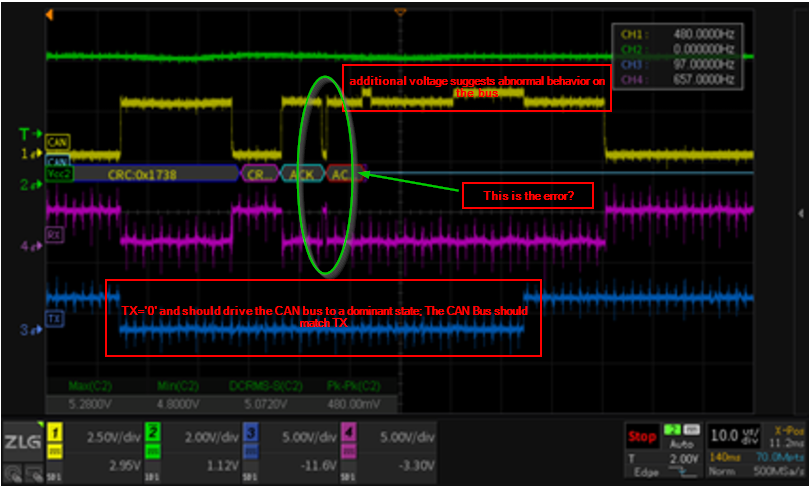
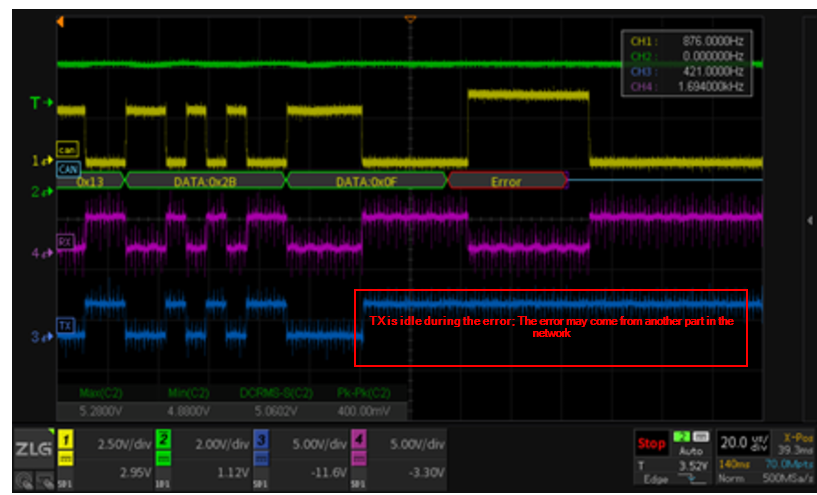
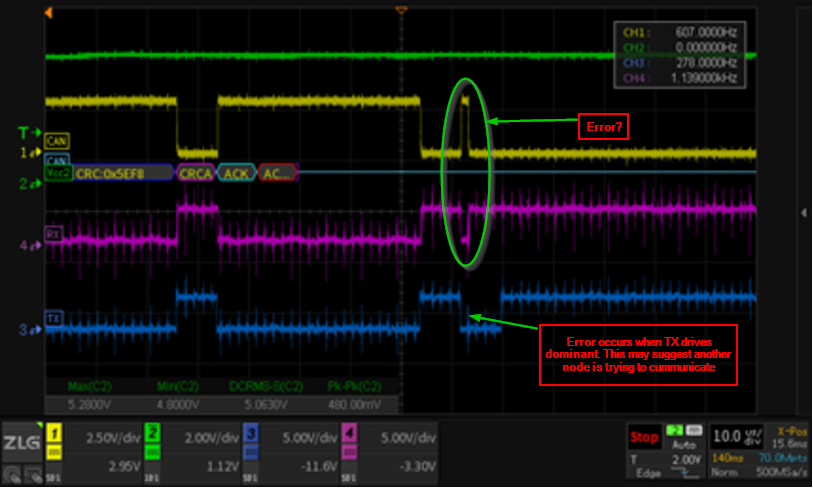
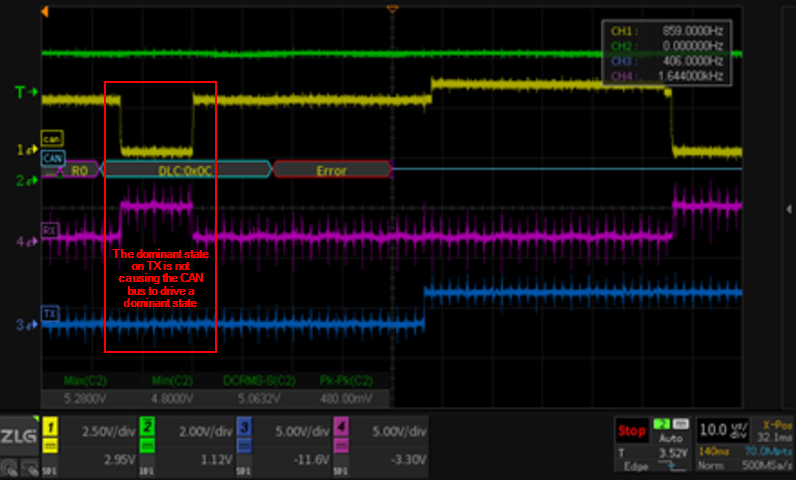
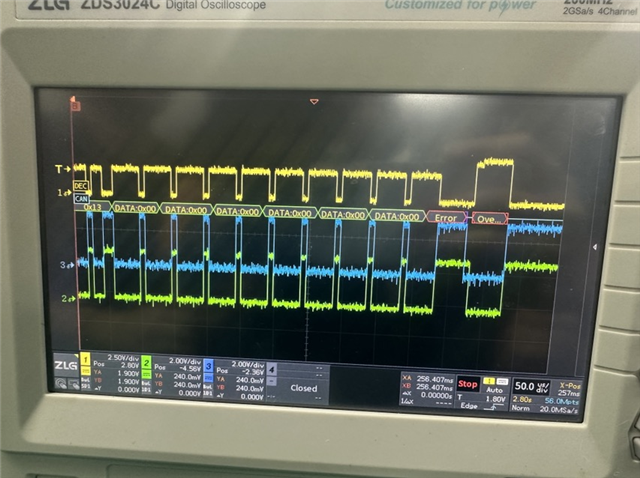
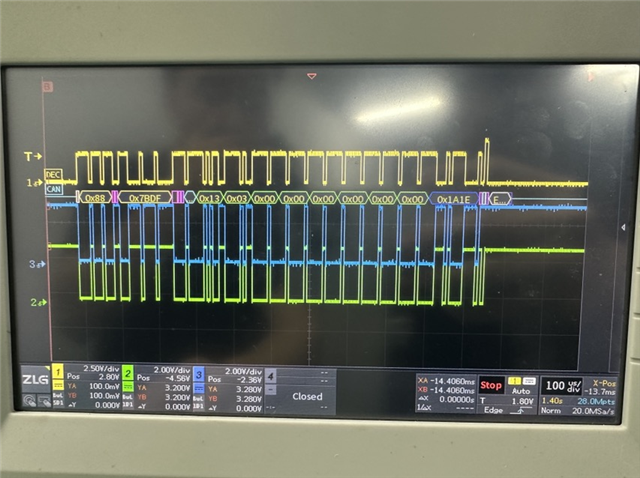
This is Racheal from AA3 Shenzhen team. My customer use ISO1050 in their products and find that there is a high error ratio. They scoped the signals of the device, results shown below.
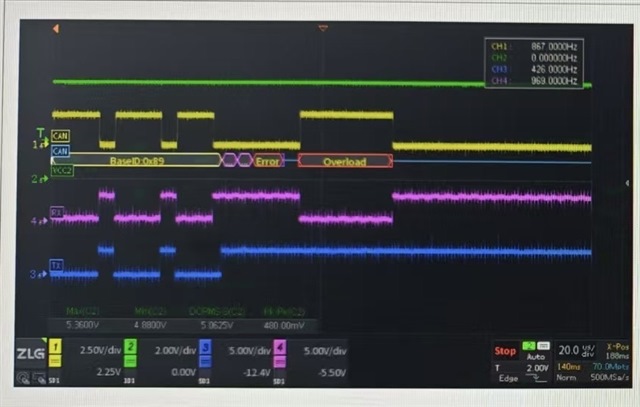
The yellow is CAN differential signal. The green is VCC2. The purple is RX. The blue is TX.
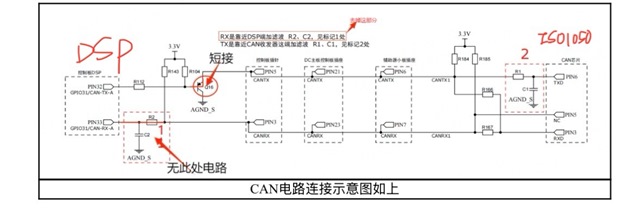
The schematics is shown below.
Seems the VCC2 is stable and did not exceed the recommended range. Could you please help with this issue?
Thanks
Racheal Shen