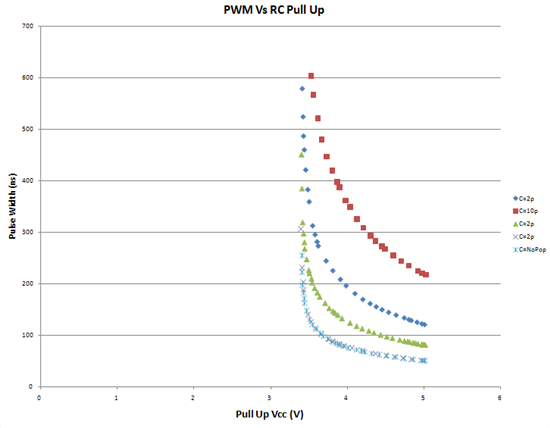
Do any techniques exist to programmatically control the pulse delay of the SN74LV123 monostable multivibrator using a microcontroller. Typically the an R and C create the normally fixed RC time constant to create a fixed pulse delay. Any ideas on how I can interface this control to an MSP430. Typical pulse delays are for my application is typically around 200ns @ 1-2 MHz.

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.