Part Number: TMS570LS3137
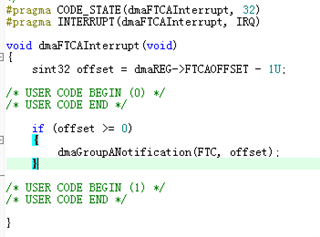
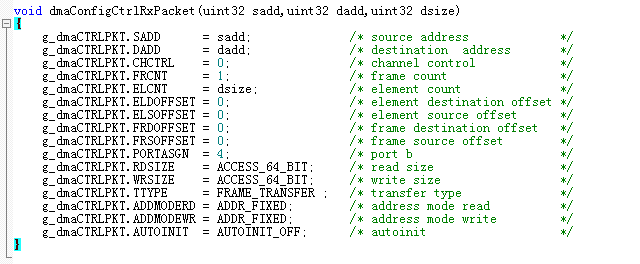
I want to use DMA mode to receive and send CAN data. I configured my program based on an example on the forum. When I sent data to the MCU, the interrupt only entered once, and there was no response when I sent it again. And I cannot configure the buffer size. When I increase the DMA buffer, I only receive one frame of data and enter the interrupt.