Part Number: TMS570LS1224
Other Parts Discussed in Thread: HALCOGEN,
I am a novice to CAN communication. I am using TCAN1043DQ1 transceiver and TMS570LS1224 launchpad ( using Halcogen and CCS environment.
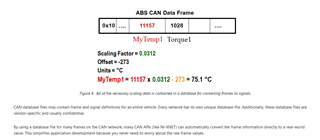
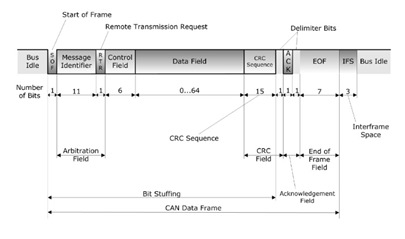
Can I get a sample code for transmitting information like given in the below image ? What are the bit fields that are essential ?
How to create a CAN database for automotive application ?