Part Number: TM4C123BH6PM
Hi Team,
The customer provide the project to re-produce with Tiva DK-TM4C123G.for the following E2E thread, I attached it.
Would you please investigate it?
The original thread is locked. So I create new one.
TM4C123BH6PM: Lost CAN massage object
< TI.png>
<ti2.png>
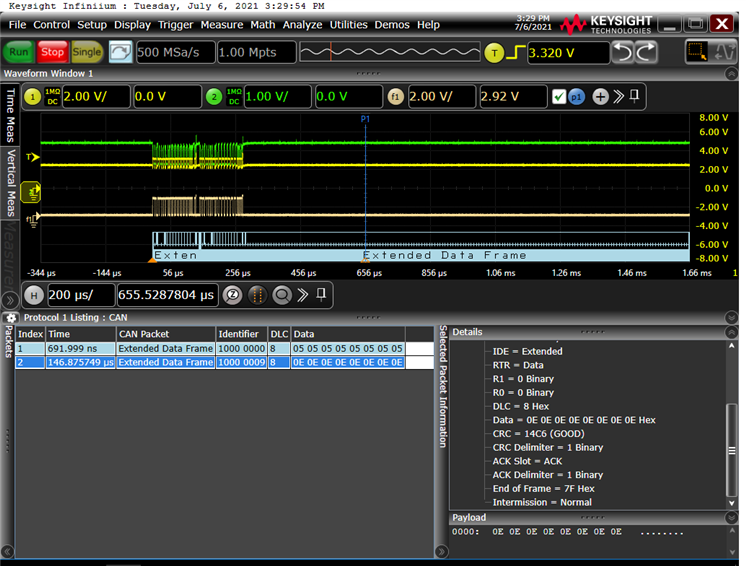
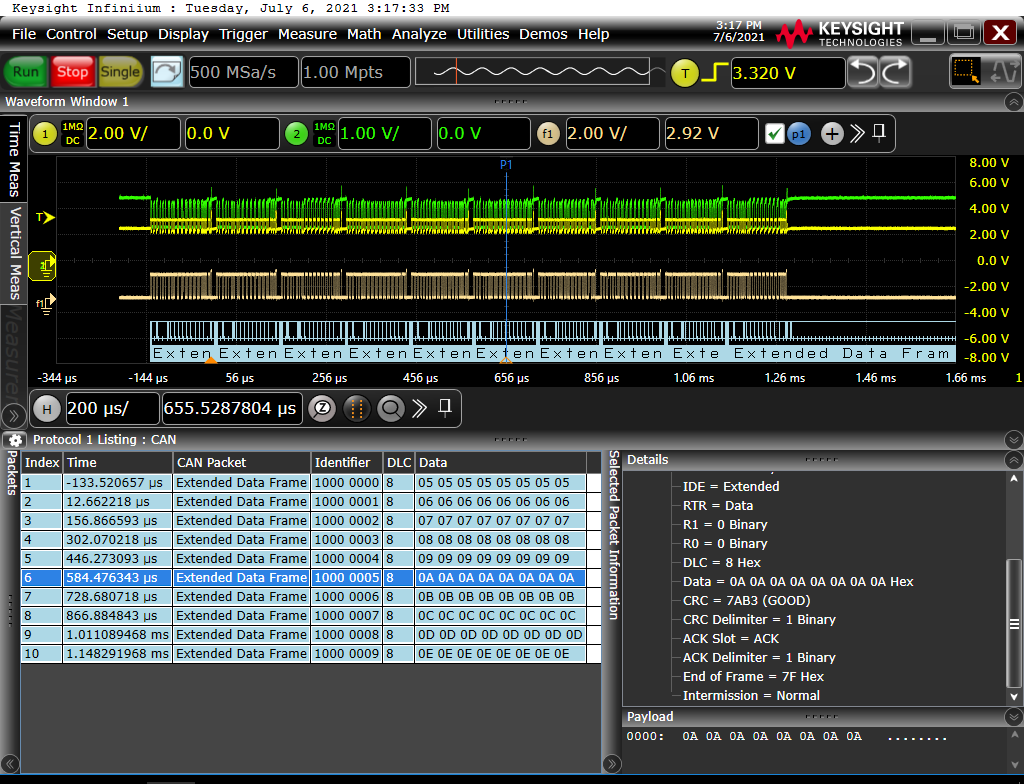
The condition of the can bus when #if is set to 1 on line 186 is indicated in the attachment "TI.png", Can bus status when #if is set to 0 on line 186 is attached "ti2.png"
Thanks and Best regards,
Kuerbis