Part Number: TMS570LC4357
Other Parts Discussed in Thread: HALCOGEN
Hi Team,
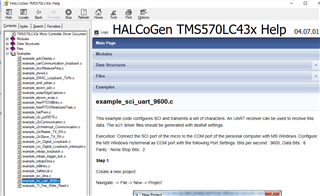
I have a customer who is using TMS570LC4357 and they have downloaded the sample code to use.
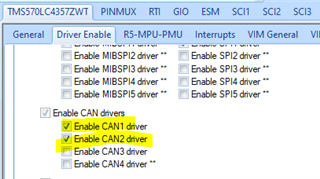
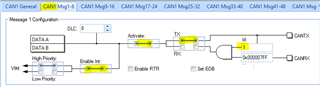
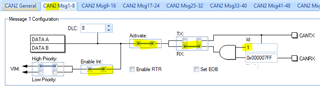
Their blinking LED application image is working properly but when they tried to communicate using CAN or UART, there seem to be an issue. Their CAN was not able to transmit anything while their UART is transmitting wrong characters.
Do you have any guidance or tips for this?
Thank you.
Best Regards,
Ernest