Part Number: AM2634
Other Parts Discussed in Thread: AM2632, UNIFLASH
Hi there.
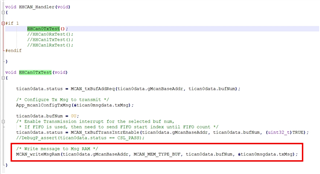
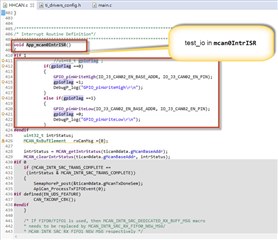
I would like to use SBL uni-flash boot function via CAN on AM2632 and we reference the example of TI supported “sbl_qspi” to add CAN function. But there is one problem I confuse about now. We found this API will be triggered twice in one task cycle. In this case, we create a 10ms task to test the CAN Tx function. However, this MCAN-writeMsgRam function has a wrong action while we use CAN tool to check the behavior.
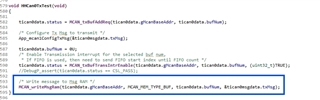
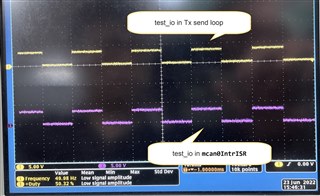
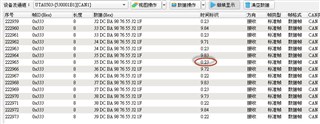
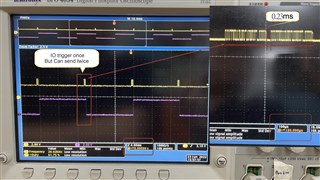
As follows, it was expected to send once every 10ms. Consequently, it becomes a bit weird. These two sent times accord to 10ms. In other words, it must be triggered twice in a cycle time. But it is wrong.

On the other hand, we try to have an experiment using XDS200 to download the .out file to the AM2632. We set a breakpoint on the MCAN-writeMsgRam function so that we can check if it really does twice in one cycle. It results that this function was triggered twice in this situation. We attach the film on youtube. www.youtube.com/watch

Could you guys please have a look at this problem?
many thanks