Part Number: TMS570LC4357
Other Parts Discussed in Thread: HALCOGEN, , LAUNCHXL2-570LC43, CCSTUDIO, DP83630, TMDX570LC43HDK, TMDSRM48HDK
Hi,
I'm trying to get EMAC working, and hit the same problem others have encountered, as in the threads here....
I followed the steps in the Halcogen help documentation to do EMAC loopback.
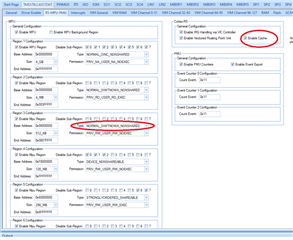
I tried setting MPU regions to NORMAL_OIWTNOWA_NONSHARED (write-through), as what supposedly worked for the above poster, but it didn't work for me.
I tried picking up the package indicated in this post:
TMS570LC4357_LaunchPad_EMAC_Loopback.zip
but didn't have permission to retrieve it.
Thanks for any and all help to get the EMAC going.