Part Number: RM48L952
Hello, thank you for always answering my questions.
Today, I would like to ask a question related to CAN's IF3.
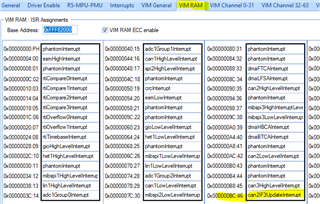
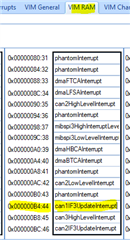
1. When receiving data from Notification using CAN IF3, IF3 does not change the value of CAN interrupt register, so the data cannot be distinguished by checking the message box number. Is this characteristic of IF3? Or is it the wrong result?
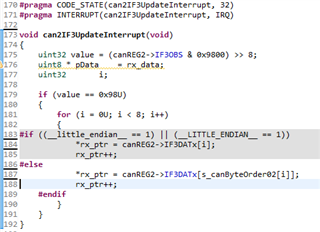
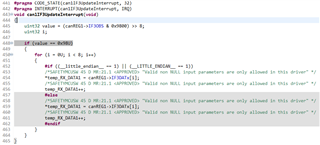
2. And to classify data using IF3, I tried to classify data by looking at the ID of the IF3 ARB register.
At this time, the ID value of the ARB register was not reset, so there was a phenomenon that the receive interrupt works even though it is a transmit interrupt. In conclusion, I added the condition "When the message box number is 0" to the condition, but I do not understand this phenomenon.
3. If IF3 does not receive the message box number value of CAN interrupt register, how should the data be classified when receiving data using IF3 in Notification?
Thank you for your time.