


I made functions but I have no idea why my code is not working. Is my I2C protocol is wrong? My EEPROM is 24LC43A
void I2C_setup(){
RCGCGPIO |= 0x8;//port E clock enable
RCGCI2C |= 0x8;//I2C module 3 enable
GPIODEN_PORTD = 0x3;//enable digital for port D0 and D1 => 00000011
GPIOAFSEL_PORTD |= 0x3;//There is a alternative function for D0 and D1
GPIOPCTL_PORTD |= 0x33;//function 3 for D0 and D1 which is SCL and SDA
GPIOODR_PORTD |= 0x2;//drain for D1 00000010
I2CMCR_3 = 0x10;//this is master
I2C_set_SCL_peiiod(0.0001);
}
void I2C_set_SCL_peiiod(double SCL_period){
I2CMTPR_3 = SCL_period * 800000 + 1;
}
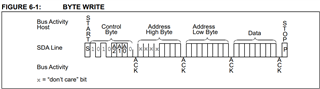
void I2Ceeprom_byte_write(char data, int address)
{
char upper_address = (unsigned)address >> 8;
char lower_address = (unsigned)address & 0xff;
// Send start condition
I2CMSA_3 = 0xA0;//1010 000 0 transmit
I2CMCS_3 = 0x3;//00011 generate start bit and I2C enable
I2C_eeprom_wait();
I2CMDR_3 = upper_address;//send address(1/2)
I2CMCS_3 = 0x1;
I2C_eeprom_wait();
I2CMDR_3 = lower_address;//send address(2/2)
I2CMCS_3 = 0x1;
I2C_eeprom_wait();
I2CMDR_3 = data;
I2CMCS_3 = 0x5;//generate stop
I2C_eeprom_wait();
I2C_eeprom_bus_wait();
}
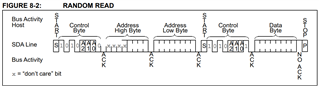
int I2Ceeprom_byte_read(int address)
{
char upper_address = (unsigned)address >> 8;
char lower_address = (unsigned)address & 0xff;
int data;
I2CMSA_3 = 0xA0;
I2CMCS_3 = 0x3;
I2C_eeprom_wait();
I2CMDR_3 = upper_address;
I2CMCS_3 = 0x1;
I2C_eeprom_wait();
I2CMDR_3 = lower_address;
I2CMCS_3 = 0x1;
I2C_eeprom_wait();
I2CMSA_3 = 0xA1;
I2CMCS_3 = 7;
I2C_eeprom_wait();
I2C_eeprom_bus_wait();
data = I2CMDR_3;
return data;
}
void I2C_eeprom_wait(){
while(I2CMCS_3 & 0x1);
}
void I2C_eeprom_bus_wait(){
while(I2CMCS_3 & 0x40);
}

