Part Number: RM46L852
Other Parts Discussed in Thread: HALCOGEN, TMS570LC4357
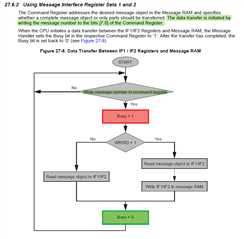
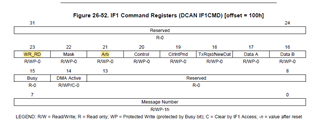
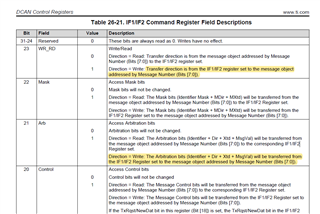
I'm trying to understand the IF2CMD register; more specifically the Message Number Field.
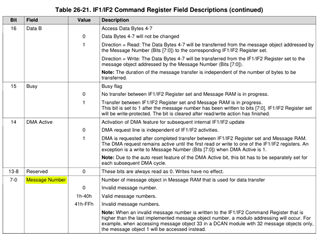
I do not understand where to find how to decode the value in this field in the documentation.
For example, to initialize a message box, HalCoGen use:
canREG2->IF2CMD = (uint8) 0xF8U;
To update ID, HalCoGen use
node->IF2CMD = 0xA0U;
What's the full description of those bits?
How can I configure the If2CMD register to modify the IF2ARB bits to enable ISR?
Regards,
Gabriel