Part Number: RM46L852
Other Parts Discussed in Thread: HALCOGEN
Hi,
I'm working on a CAN driver and I wanted to understand better the Error and Status Register.
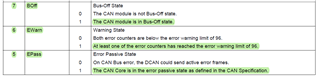
In the reference manual, the CAN error seems like a bitfield:
The CAN parity error is completely unrelated to CAN Passive state.
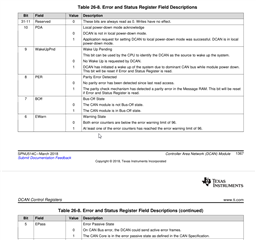
But in the code generated by HalCoGen, those bits are described as a "Level".
The CAN parity error is simply when the RX/TX error counter is between 128 and 255.

Those two models seem mutually exclusive, to me.
What model is correct and why?
Best regards,
Gabriel