Other Parts Discussed in Thread: HALCOGEN
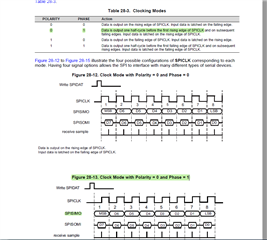
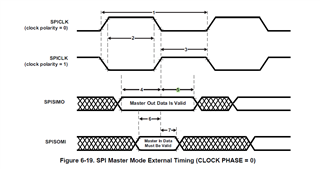
On the TMS570 processor we have a chip we are communicating with that seems to need the MOSI line to lead the clock, is there a field in the SPI controller to adjust that?
On the TMS570 processor we have a chip we are communicating with that seems to need the MOSI line to lead the clock, is there a field in the SPI controller to adjust that?