- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi BU,
The background is customer found that their timer-based periodical tasks not run anymore after their board working continuously for 9 days.
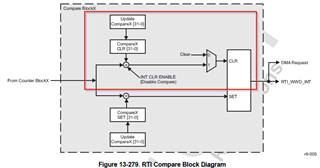
From my understanding, there are 2 stages for handling the interrupt inside the chip hardware: RTI interrupt generation logic + VIM interrupt prioritizing and processing. After RTI INT condition is met, the VIM IRQ STS should be set and waiting to be active.
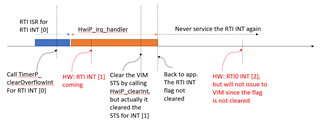
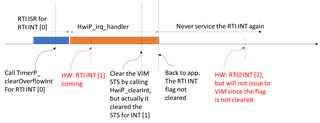
I wrote a program to understand the hardware behavior. And it seems that from hardware behavior, the corresponding VIM IRQ STS will not set if the previous RTI INT Flag is not cleared. To better manifest this, please see following fig:
And the test codes is attached: timer_int_not_handled.zip
I have following thoughts:
1). the root reason for this issue is that when the previous RTI INT flag is not cleared, the latter RTI INT will not issue to VIM to set the VIM INT STS, right?
2). change the attribute of type from Pulse to Level to solve this problem;
3). enable the periodical flag clearing feature in RTI to solve this problem.
Please check this issue and give your suggestions, thanks.
BR,
Will