


Going through the API documentation (https://software-dl.ti.com/mcu-plus-sdk/esd/AM243X/08_06_00_45/exports/docs/api_guide_am243x/group__DRV__SCICLIENT__MODULE.html) of sciclient suggests that it is possible to configure the driver to be RTOS aware and interrupt based. (https://software-dl.ti.com/mcu-plus-sdk/esd/AM243X/08_06_00_45/exports/docs/api_guide_am243x/group__SCICLIENT__HAL.html)
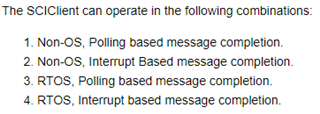
Looking at the source code the driver only supports polling based bare-metal operation contrary to what the documentation states. A driver which does polling inside of a critical section can have severe side-effects on RTOS based projects.
We found an implementation of the driver with server/client architecture as part of the Jacinto7 PDK. Is it planned to port this functionality also on Sitara architecture?
Jacinto7 PDK https://software-dl.ti.com/jacinto7/esd/processor-sdk-rtos-jacinto7/06_01_01_12/exports/docs/pdk/docs/user_guide/html/group__SCICLIENT__HAL.html
If not, is it guaranteed to receive a response from DMSC in a specified time? Is information available for latency introduced by sciclient polling?
Thank you for your support
Oliver

