Part Number: AM2634
Hi,
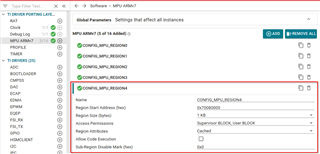
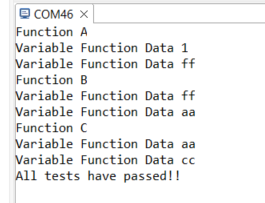
I'm trying to find an example for how to setup and use MPU. The SDK documentation gives the details of how to setup a MPU region, but how do I setup privilege's for accessing functions. Can you provide a simple example code where there is a global variable at a specific MPU protected region and 3 functions where one function has read/write access, one function has only read access and one function has no read and write access.
Regards,
Harsha