



Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: EK-TM4C1294XL
Hi,
I want to develop application where the sampling rate of ADC must be 1MSPS and there are 4 channel to sample. I don't want to miss the data so I am using ethernet to send the data to my PC via TCP/IP protocol.
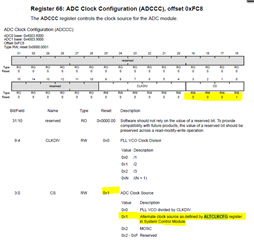
I went through enet_adcsensor_client_lwip example project, but I am not able to get configure ADC conversion speed as 1MSPS.
Requesting you to please guide.
thanks.


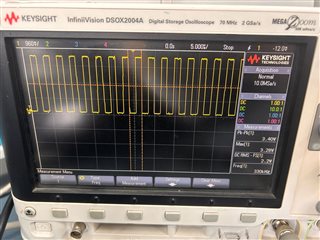 When i running a following code to sample a ADC data at 1Msps, I am able to watch only 333.38Khz of frequency on GPIO E port. but if I am correct then i should get the value 1Mhz/64 = 15625Hz right?
When i running a following code to sample a ADC data at 1Msps, I am able to watch only 333.38Khz of frequency on GPIO E port. but if I am correct then i should get the value 1Mhz/64 = 15625Hz right?