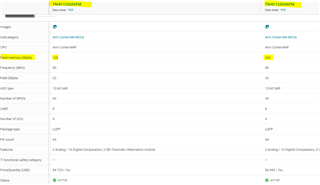
Part Number: TM4C123GE6PM
Other Parts Discussed in Thread: TM4C123GH6PM, , EK-TM4C123GXL
Hi,
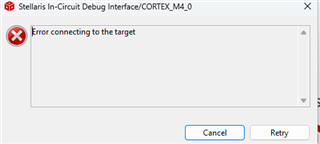
I have a problem where after flashing the micro in a custom board for the first time, I can't either debug nor program it again.
I'm using TI-RTOS (2_16_00_08) and I've created my project in two ways to see if there was any difference, but unfortunately the result is the same.
One way is importing an example from the Resource explorer and modify it to my selected micro. Since the examples are meant to be for the TM4C123GH6PM, I change the device and linker command in the general tab of the project properties (to the micro I'm using TM4C123GE6PM) and also the flags in the XDCtools tab.
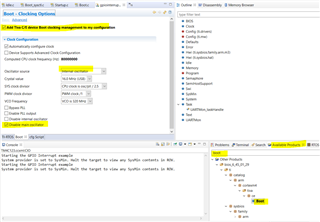
The other way is creating a project from scratch for the selected device, selecting an empty RTSC project option, selecting the appropriate linker command file and the correct platform in the XDCtools platform option (ti.platforms.tiva:TM4C123GE6PM). After creating a new .cfg file, importing my code and compiling correctly I've the same result. I can flash the micro once, but after trying one more time, I get an error. The only way I can access the micro again is using the LM flash programmer and do a Debug port unlock. Obviously, this is a temporary solution.
There is obviously something not right and I've not been able to figure what it is. I'd appreciate your help on this.
Best,
Alberto.