


Part Number: MCU-PLUS-SDK-AM263X
Other Parts Discussed in Thread: SYSCONFIG
I use RTI for SOC ADC. And set up EOC ISR for reading value.
I noticed the EOC ISR starts earlier than the RTI callback.
In my expectation, it should be: RTIstarts -> RTI SOC ADC -> RTI cb -> EOC ISR
but in real case it is: RTIstarts -> RTI SOC ADC -> EOC ISR -> RTI cb
1st question where I should I stop RTI timer?
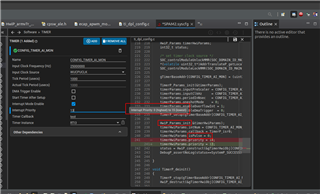
When I configuring RTI timer it shows me 0 priority is highest, 15 is lowest. But in generated code, it performs via the HwiP_Params_init function, where initially setts it up to params->priority = (HwiP_MAX_PRIORITY-1); where HwiP_MAX_PRIORITY is 16.
2nd question is, is it a bug?
3rd question is, why it is forbidden to configure the isPulse field via syscfg ?
Regards!

