


Part Number: MCU-PLUS-SDK-AM243X
Other Parts Discussed in Thread: SYSCONFIG
Hi BU experts,
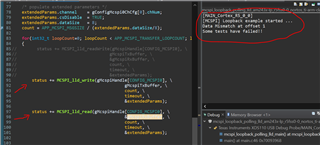
My customer is looking for separated API for MCSPI LLD (use read and write instead of readWrite). They have tried mcspi_lld_read() and mcspi_lld_write() in the mcspi_loopback_polling_lld example but gets incorrect data.
I saw in the lld driver document AM64x MCU+ SDK: MCSPI Low Level Driver (ti.com) that "The MCSPI peripheral must call MCSPI_lld_readWrite() / MCSPI_lld_readWriteIntr() / MCSPI_lld_readWriteDma() before the controller starts transmitting."
Does this means separated API is not available? How to use read and write APIs properly?
Thanks,
Hang.




