Part Number: MCU-PLUS-SDK-AM243X
I've added the following code:
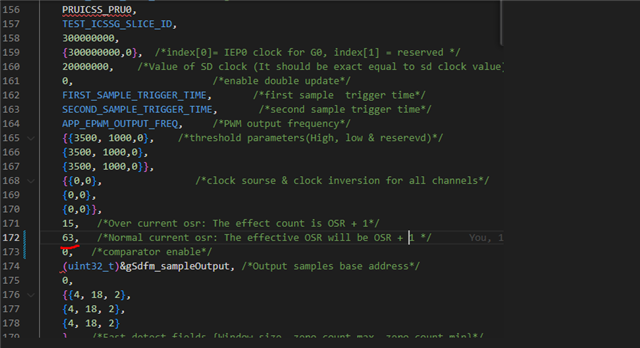
OSR is 64, normal current only.
16Khz
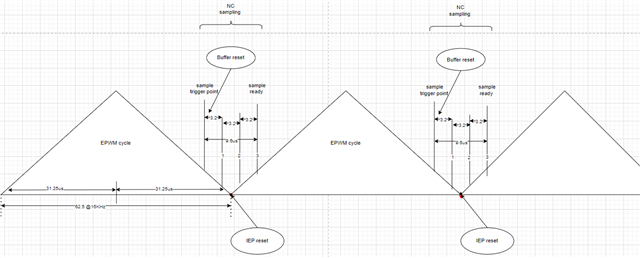
double sampling is on.
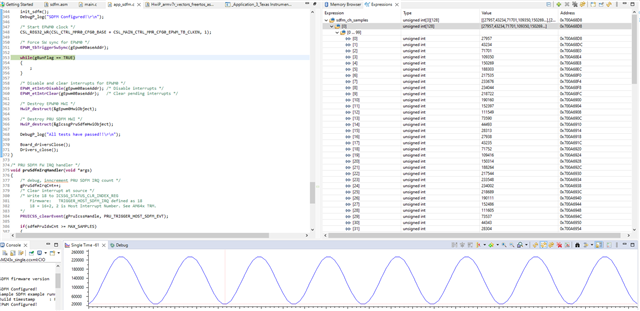
I'm having noisy samples every 26 or so samples.
Please advise
Part Number: MCU-PLUS-SDK-AM243X
I've added the following code:
OSR is 64, normal current only.
16Khz
double sampling is on.
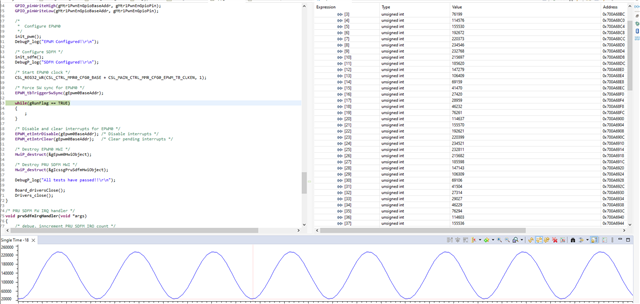
I'm having noisy samples every 26 or so samples.
Please advise