A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
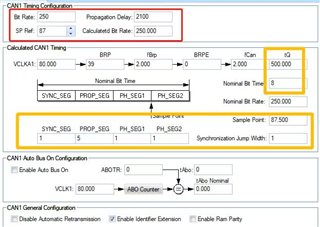
TMS570LS0332: For the content in the yellow box, what means can be changed according to customer needs?
Basically the CAN bit period can be subdivided into four time segments. Each time segment consists of a number of Time Quanta (tq). The Time Quanta is the smallest time unit for all configuration values. The Time Quanta (tq) is determined by baud-rate and BRP.
Time Quanta tq: (BRP+1)/CAN_CLK
Number of Quanta: CAN_CLK / [Baud-rate * (BRP+1)]
There are several options for number of time quanta and length of segments (Tseg1, Tseg2) for a given baudrate. The HALCoGen only gives one option, that might not be the best choice for your application.
The number of segments are not changeable from the HAL GUI, but you can change them in the HAL generated source file: can.c
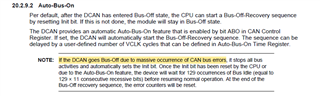
There are two error counters: TX error counter and RX error counter. Bus Off occurs when the transmit error count raises above 255. Whenever a node fails to transmit a frame, it increases the error counter and when the counter increases beyond 255, the node gets in bus-off state and can not further participate on the bus.