Other Parts Discussed in Thread: SYSCONFIG
Hello,
I am trying to implement the communication between LP-AM243 and Microchip's PCI11400 PCI-SPI bridge.
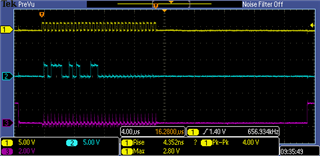
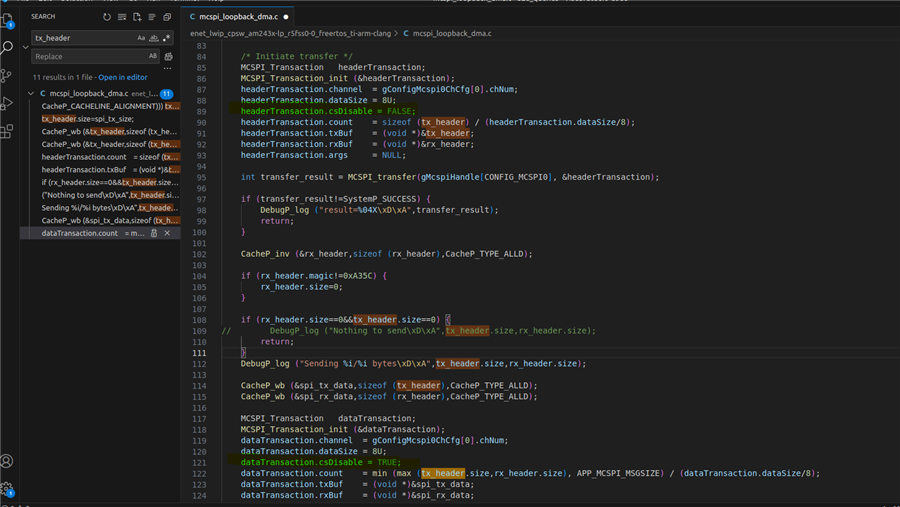
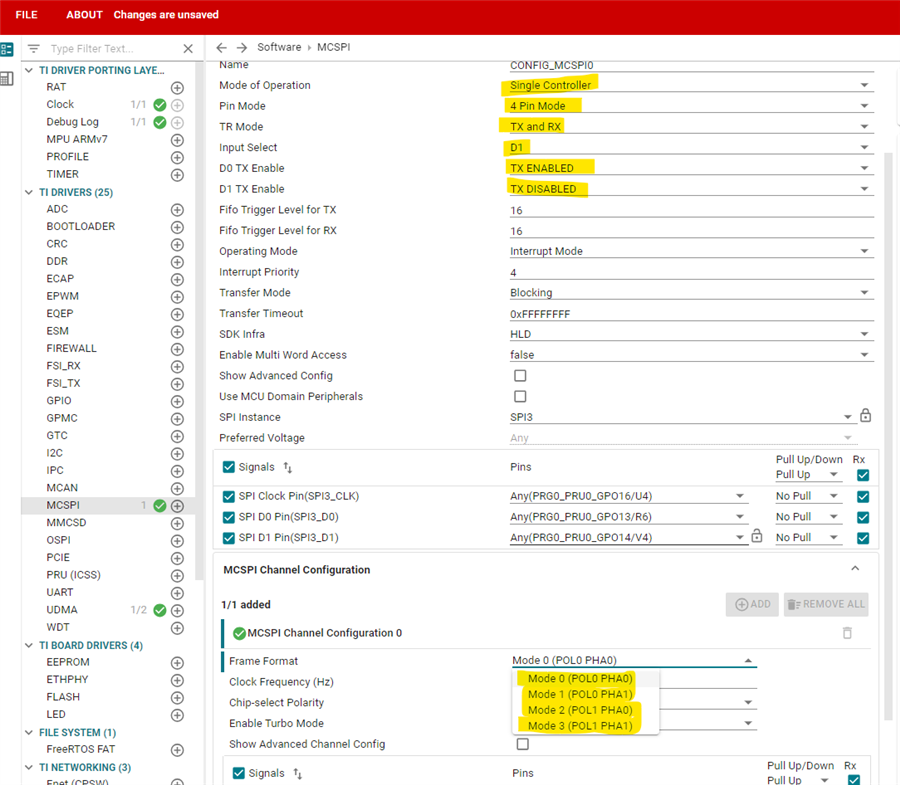
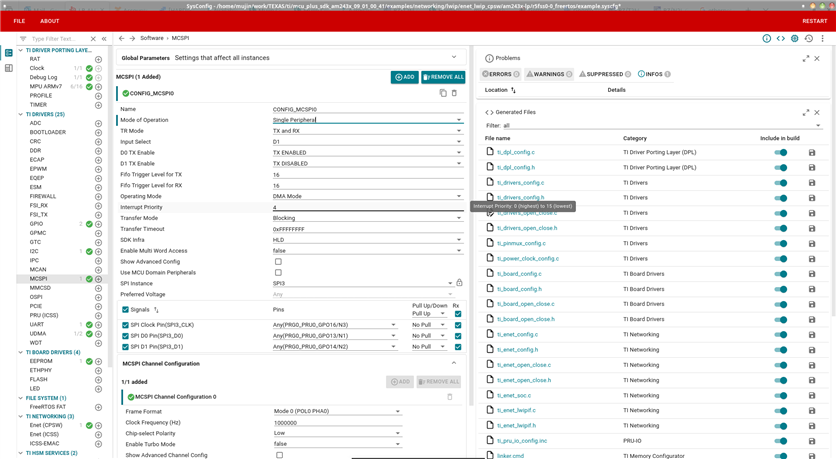
The bridge is host only, and is verified to output data (I can see waveforms on oscillograph). LP-AM243 connected to PCI11400 through SPI3 pins (J1.13, J2.6, 12,14 even though CS apparently is not needed). Software on the Texas side uses parts of mcspi_loopback_dma example, and also works if the device is configured in host mode - once again, I've seen waveforms. However, if the configuration is changed for device mode, transmission does not occur.
While I can see CLK signal oscillating, the transfer does not happen. Additionally, if I try to change the configuration for polling and step over the program, the interrupt never happens and CSL_MCSPI_IRQSTATUS is always zero.
I feel like I am missing some configuration details, but I've checked out most every aspect.
Could someone please point me in the correct direction?
Best regards,
Gennadii.