Part Number: AM2634-Q1
Hi,experts!
When I was using Autosar OS, I would call the critical section protected interface, but I found that at some point my interrupt(priority 15) still triggered after I set IRQ_PRIMSK(0xFF).
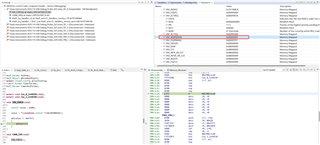
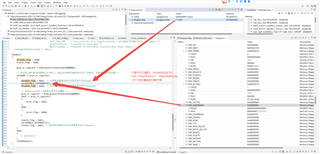
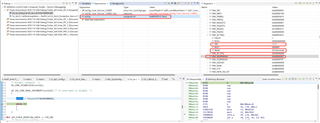
As shown in the figure below, I recorded the register information of the exception time and can see that the value of IRQ_PRIMSK was set to 0xFF, but the interrupt with priority 15 was still triggered.
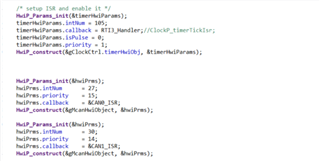
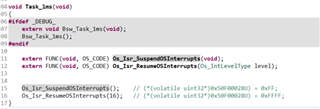
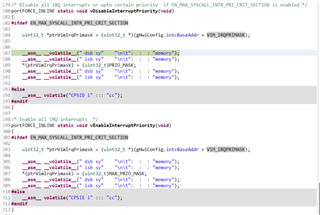
The code to manipulate the IRQ PRIMSK register is shown below