Part Number: MSPM0G3507
Dear support team,
for my application I need SPI in SPI_MOTO3_POL1_PHA1 mode. From principle behaviour is correct.
But initial behaviour is ugly, driver first switch gpio mux to spi Interface then the spi Interface is configured.
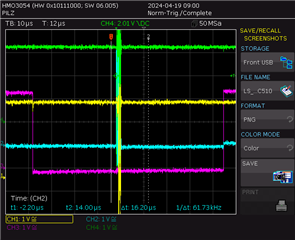
This leads to a drifting clock signal from high in direction of zero.
See appended screenshot from oscilloscope, green signal channel.
Depending on voltage drift level this leads sometimes in case of init process to an useless read process.
So my workaround, is doing first time a dummy read, and throw away the result.
Is there a plan of TI to improve driver behaviour?
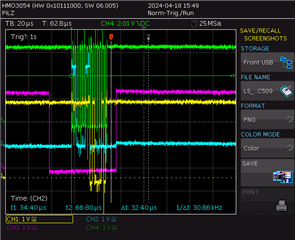
Second part of question, is there a plan to improve time between calling SPI_transfer, and real action on bus.
When I see the huge time between setting cs low (pink) and starting transfer on bus, this makes me ugly.
It is better in case of normal run, but when I see the call hierarchie and all the other stuff not really funny.
Code example:
Regards
Siegfried