Part Number: MSPM0G3507
Other Parts Discussed in Thread: , TCAN1046ADEVM
Tool/software:
I am currently using the MSPM0G3507 development board and working with examples from the mspm0_sdk_1_30_00_03. I am using the mcan_single_message_tx and mcan_multi_message_tx examples. I tried to observe the transmitted waveform by connecting an oscilloscope to the TX and GND pins. However, no matter how I try, there is no waveform transmitted on the TX pin.
Could you please tell me what I need to change? Thank you.
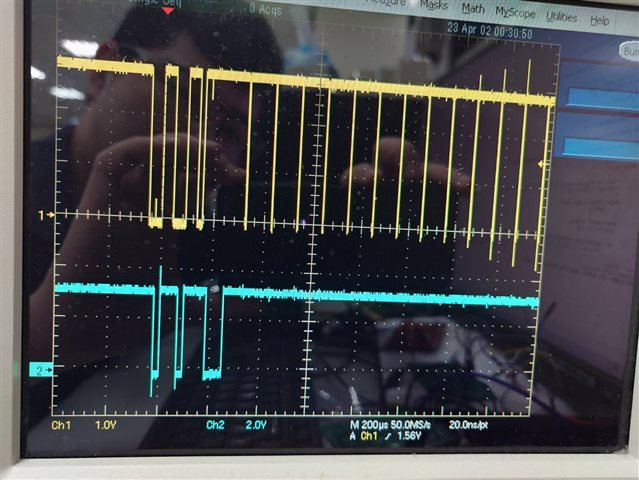
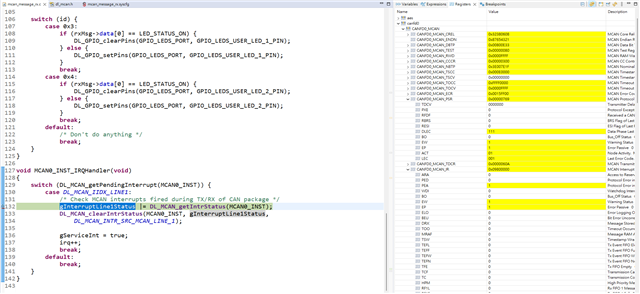
I have set two variables in the program to check if it enters the interrupt and if the program finishes. Everything seems to be working fine, but there is still no signal generated. What might be the issue? Neither of the examples produce a TX signal. The first time I flash and run the program (pressing PB21), I receive a strange error waveform. However, no matter how I test it afterward (pressing PB21), there is no activity on the TX pin. The oscilloscope shows the signal remains at a high level with no changes.
The image above shows the signal generated the first time I press (PB21) after flashing the code (the signal content does not match the transmitted data). However, no matter how I test it afterward, the TX pin does not produce any signal and remains at a high level.
Thank you.