Tool/software:
Hi
CAN communication using EK-TM4C1294XL as the slave receiving mode. I downloaded the sample code (spna245.zip) according to spna245.pdf, executed [simple_can_rx] on the receiving side, and confirmed that communication could be performed normally.
https://www.ti.com/lit/an/spna245/spna245.pdf
Code Composer Studio Code has below
//
// Initialize a message object to be used for receiving CAN messages with
// any CAN ID. In order to receive any CAN ID, the ID and mask must both
// be set to 0, and the ID filter enabled.
//
sCANMessage.ui32MsgID = 0x321;
sCANMessage.ui32MsgIDMask = 0;
sCANMessage.ui32Flags = MSG_OBJ_RX_INT_ENABLE | MSG_OBJ_USE_ID_FILTER;
sCANMessage.ui32MsgLen = 8;
//
// Now load the message object into the CAN peripheral. Once loaded the
// CAN will receive any message on the bus, and an interrupt will occur.
// Use message object 1 for receiving messages (this is not the same as
// the CAN ID which can be any value in this example).
//
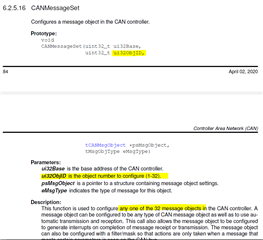
CANMessageSet(CAN0_BASE, 0x321, &sCANMessage, MSG_OBJ_TYPE_RX);
//
// Enter loop to process received messages. This loop just checks a flag
// that is set by the interrupt handler, and if set it reads out the
// message and displays the contents. This is not a robust method for
// processing incoming CAN data and can only handle one messages at a time.
// If many messages are being received close together, then some messages
// may be dropped. In a real application, some other method should be used
// for queuing received messages in a way to ensure they are not lost. You
// can also make use of CAN FIFO mode which will allow messages to be
// buffered before they are processed.
//
for(;;)
{
unsigned int uIdx;
//
// If the flag is set, that means that the RX interrupt occurred and
// there is a message ready to be read from the CAN
//
if(g_bRXFlag)
{
//
// Reuse the same message object that was used earlier to configure
// the CAN for receiving messages. A buffer for storing the
// received data must also be provided, so set the buffer pointer
// within the message object.
//
sCANMessage.pui8MsgData = pui8MsgData;
//
// Read the message from the CAN. Message object number 1 is used
// (which is not the same thing as CAN ID). The interrupt clearing
// flag is not set because this interrupt was already cleared in
// the interrupt handler.
//
CANMessageGet(CAN0_BASE, 0x321, &sCANMessage, 0);
//
// Clear the pending message flag so that the interrupt handler can
// set it again when the next message arrives.
//
g_bRXFlag = 0;
//
// Check to see if there is an indication that some messages were
// lost.
//
if(sCANMessage.ui32Flags & MSG_OBJ_DATA_LOST)
{
UARTprintf("CAN message loss detected\n");
}
//
// Print out the contents of the message that was received.
//
UARTprintf("Msg ID=0x%08X len=%u data=0x",
sCANMessage.ui32MsgID, sCANMessage.ui32MsgLen);
for(uIdx = 0; uIdx < sCANMessage.ui32MsgLen; uIdx++)
{
UARTprintf("%02X ", pui8MsgData[uIdx]);
}
UARTprintf("total count=%u\n", g_ui32MsgCount);
}
}
When using STM32F407VET6 as the master and changing the receiving side to EK-TM4C1294XL, or when connecting with our own products communication cannot be performed.
PA0 = CAN_L
PA1 = CAN_H
GND = GND