Part Number: TM4C1237H6PZ
Tool/software:
Hi,
I'm dealing with a hard fault which currently prevents me from being able to validate the application.
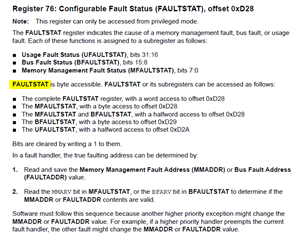
At each reset the FAULT_STAT register is all zero.
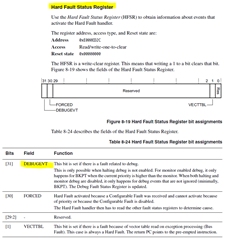
Instead, the HARD FAULT STAT register is always at zero, but when the ISR hard fault is triggered the DBG bit is at 1 (only that).
In the datasheet it is written that the bit is reserved for DEBUG but the application is not in debug.
And I can't find additional information for this type of hard fault.
I therefore ask if you can elaborate on the meaning of this bit, and the possible causes of it
Set to 1.
Looking forward to your kind reply,
Best regards.