Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
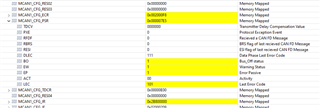
Hello, I am trying to make the ECU enter bus off to do some stuff in CanIf_ControllerBusOff, but neither the bus off handler(Can_mcanProcessBusOff) nor CanIf_ControllerBusOff is being called.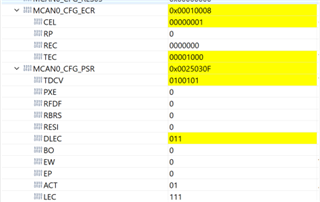
The transmission counter increases but the bus off flag in never raised.
Could you guide how to make the bus off flag raised?
I put a breakpoint at Canwrite to make the ECU stop before sending and after that shorting the CANHigh and CANLow and go.
Yours,
Abdelrhman Afifi