Tool/software:
Hi,
My customer has some questions in the app note of AM243x/AM64x Single Chip Servo Motor Control Implementation and Benchmark (sprad03 – March 2022).
Could you answer their questions below ?
1. Processing time
Is the CPU processing time for control period the total of Open Loop Id/Iq, Closed Loop Id/Iq, Closed Loop Speed, Closed Loop Position and Closed Loop CiA402 ?
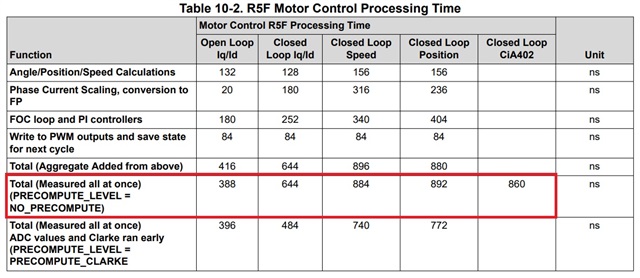
2. Difference between Table 10-2 and Table 14-5
There are Table 10-2 and 14-5. Do the numbers in Table 10-2 come from the Max normalized in Table 14-5 ?
If the customer wants to know the maximum value of CPU processing for control period, they should summate all of Max values in Table 14-5 ?
It would be 4568 [ns] ?
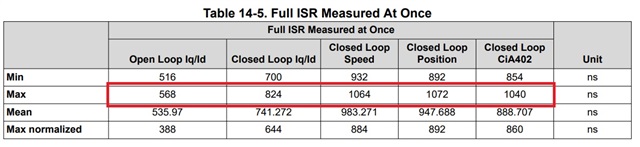
3. Difference between Min and Max
In the Table 14-5, there are Min an Max value. Could you tell them what the factor is for these differences ?
4. Update
This app note looks old, issued in 2022. Do you have any update or improvement in this benchmark ?
Thanks and regards,
Hideaki