Part Number: AM2632
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Dear TI team,
we are facing an issue interfacing an Allegro ACS773 100A (13.2mV/A) with a Sitare AM2632 pinV8.
The sensor has a bias of 1.65V (0A = 1.65V).
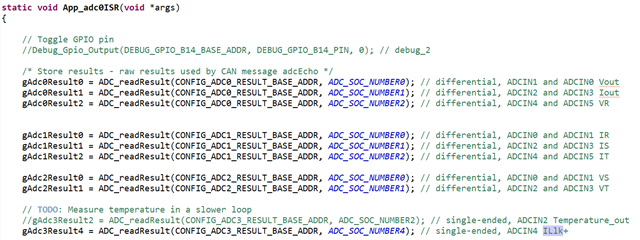
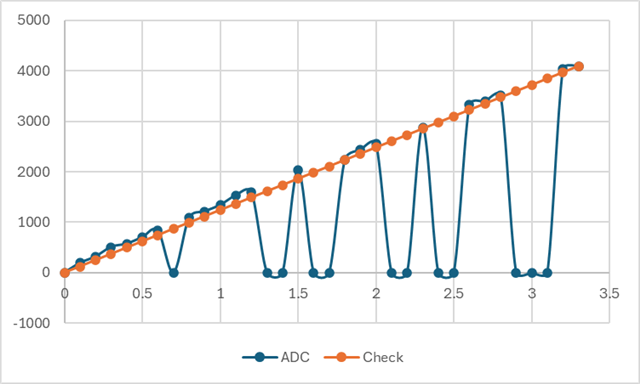
Specifically the Sitara is not able to detect any change of the negative current in the range of 0A - 2A and the positive current is measured as negative with odd values.
I checked the output of the sensor and it's totally alligned to the expectation, I made a variable current flow into the sensor and its output was always correct.
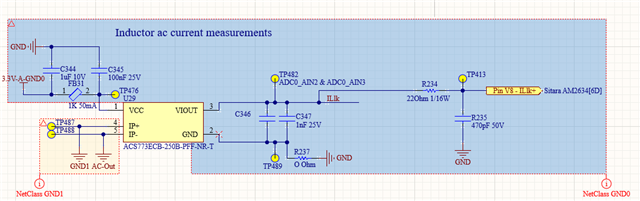
This is the total sensor circuit
And this is the Sitara's ADC supply
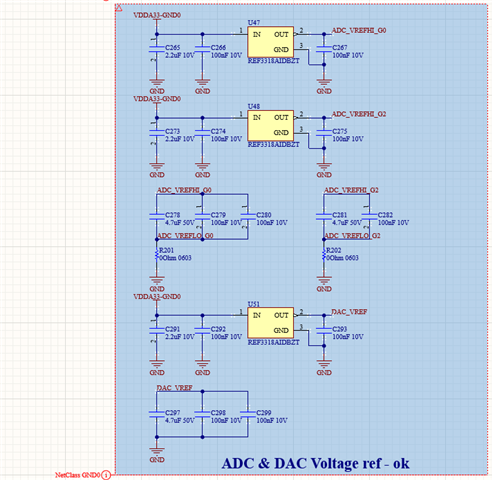
R201 and R202 were removed.
Thanks for your help.