Tool/software:
Hi,
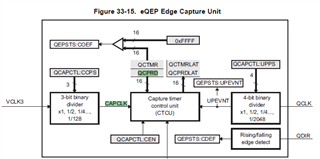
I am trying to use eQEP module for speed measurement. I have read through the reference manual for RM57 specifically Fig 33-15 and 33-17. I have following questions.
1. What is the difference equations 67 and 68. In equation 67. In equation 67, we divide number of pulses between unit position events by elapsed time between UNIT POSITION events. Whereas in equation 68, we divide the delta value of the position counter between UNIT TIMER events.
2. It also talks about using capture module for low speed measurement. What is the criteria for low speed, medium and high speed?
3. What is the role of Unit timer and Capture timer?
Any help will be greatly appreciated.
Thanks,
Ravi