Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hi,
I have a simple question regarding a modification of example code "single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang".
Design Guide: TIDEP-01032, EtherCAT® Connected, Single-Chip, Dual-Servo Motor Drive Reference Design
describes a dual-channel motor control with 2 motors.
My individual motor control setup has only a single motor, using an EnDAT 2.2 encoder.
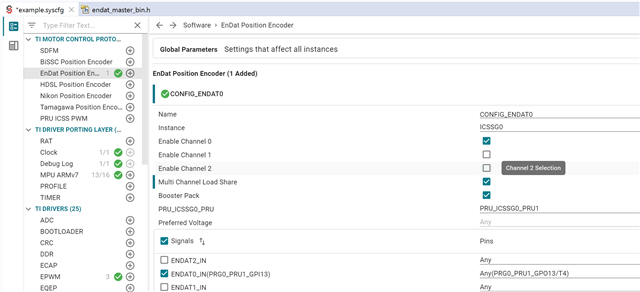
I can use the example code "single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang" for my single motor setup without problems by unchecking "Enable Channel 2" in the "EnDat Position Encoder" Section of sysconfig:
The code works well like this and I could just leave it like that.
Nevertheless I would like to understand, why the example code requires to have "Multi Channel Load Share" to be enabled.
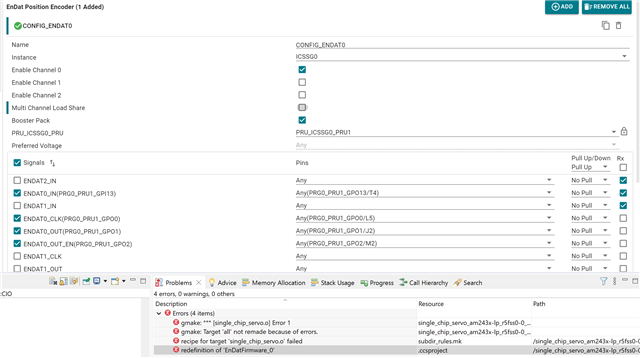
If I uncheck the Multi Channel Load Share option in sysconfig, I get a compiler error "redefinition of EnDatFirmware_0":
My question:
Why does the Multi Channel Load Share option need to be enabled in sysconfig?
If I wanted to use my setup with a single motor without Load Sharing, what would I have to do? Do I need to reconfigure the EnDat firmware and if so, how would that be done?
Thank you.