Tool/software:
Hi,
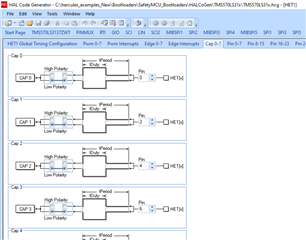
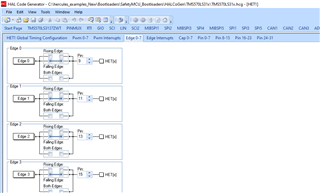
I am currently working on a safety critical project and one of the requirement is to measure motor speed and direction of rotation. We are using quadrature encoder signals as one of the way to measure speed using eQEP module and 3 hall effect sensors separated by 120 degrees around a BLDC motor as the other way to detect speed for redundancy. The 3 hall signals are connected to N2HET pins. I am able to read speed using eQEP module but I am kind of lost on how to get started on measuring speed and direction using N2HET.
The 3 signals from the hall sensors would be phased shifted by 120 degrees. So, my approach is to measure the frequency of one of the signas. Using signal frequency, we can derive speed value and by looking at the phase sequence of the 3 signals, we should be able to get direction information. My question is, is there a way to do this using NHET? Can someone guide me with some information to help me get started?
Thanks,
Ravi