


Tool/software:
Hi Everyone,
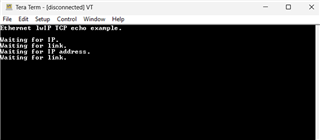
I am performing enet_tcpecho_server_lwip example on EV board but unable to get IP address on terminal window. As seen below:

I am getting below output:

//*****************************************************************************
//
// enet_tcpecho_server_lwip.c - Sample Echo Server Application using lwIP.
//
// Copyright (c) 2019-2020 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.2.0.295 of the EK-TM4C1294XL Firmware Package.
//
//*****************************************************************************
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/debug.h"
#include "driverlib/flash.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/rom.h"
#include "driverlib/rom_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/systick.h"
#include "drivers/pinout.h"
#include "lwip/tcp.h"
#include "utils/locator.h"
#include "utils/lwiplib.h"
#include "utils/uartstdio.h"
#include "utils/ustdlib.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>Ethernet TCP Echo Server (enet_tcp_echo_server)</h1>
//!
//! This example application demonstrates the operation of the TM4C129x
//! Ethernet controller using the lwIP TCP/IP Stack. DHCP is used to obtain
//! an Ethernet address. If DHCP times out without obtaining an address,
//! AutoIP will be used to obtain a link-local address. The address that is
//! selected will be shown on the UART. The application echoes back the data
//! received from the client with the inverted case.
//!
//! UART0, connected to the Virtual Serial Port and running at 115,200, 8-N-1,
//! is used to display messages from this application.
//!
//! For additional details on lwIP, refer to the lwIP web page at:
//! http://savannah.nongnu.org/projects/lwip/
//
//*****************************************************************************
//*****************************************************************************
//
// Defines for setting up the system clock.
//
//*****************************************************************************
#define SYSTICKHZ 100
#define SYSTICKMS (1000 / SYSTICKHZ)
//*****************************************************************************
//
// Interrupt priority definitions. The top 3 bits of these values are
// significant with lower values indicating higher priority interrupts.
//
//*****************************************************************************
#define SYSTICK_INT_PRIORITY 0x80
#define ETHERNET_INT_PRIORITY 0xC0
//*****************************************************************************
//
// Telenet Port Number
//
//*****************************************************************************
#define PORT 23
//*****************************************************************************
//
// The variable g_ui32SysClock contains the system clock frequency in Hz.
//
//*****************************************************************************
uint32_t g_ui32SysClock;
//*****************************************************************************
//
// The current IP address.
//
//*****************************************************************************
uint32_t g_ui32IPAddress;
//*****************************************************************************
//
// Global counter to keep track the duration the connection has been idle.
//
//*****************************************************************************
uint32_t g_ui32tcpPollTick = 0;
//*****************************************************************************
//
// Volatile global flag to manage LED blinking, since it is used in interrupt
// and main application. The LED blinks at the rate of SYSTICKHZ.
//
//*****************************************************************************
volatile bool g_bLED;
//*****************************************************************************
//
// This is the buffer to receive the TCP payload. Data in this buffer is then
// processed before echoing back to the host.
//
//*****************************************************************************
char g_pctcpBuffer[4096] = {0};
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*****************************************************************************
//
// Global flags to be set when the callback function is called
//
//*****************************************************************************
struct cbFlag {
volatile bool EchoSent;
volatile bool EchoPoll;
uint32_t len;
} g_scbFlag;
//*****************************************************************************
//
// Display an lwIP type IP Address.
//
//*****************************************************************************
void
DisplayIPAddress(uint32_t ui32Addr)
{
char pcBuf[16];
//
// Convert the IP Address into a string.
//
usprintf(pcBuf, "%d.%d.%d.%d", ui32Addr & 0xff, (ui32Addr >> 8) & 0xff,
(ui32Addr >> 16) & 0xff, (ui32Addr >> 24) & 0xff);
//
// Display the string.
//
UARTprintf(pcBuf);
}
//*****************************************************************************
//
// Required by lwIP library to support any host-related timer functions.
//
//*****************************************************************************
void
lwIPHostTimerHandler(void)
{
uint32_t ui32NewIPAddress;
//
// Get the current IP address.
//
ui32NewIPAddress = lwIPLocalIPAddrGet();
//
// See if the IP address has changed.
//
if(ui32NewIPAddress != g_ui32IPAddress)
{
//
// See if there is an IP address assigned.
//
if(ui32NewIPAddress == 0xffffffff)
{
//
// Indicate that there is no link.
//
UARTprintf("Waiting for link.\n");
}
else if(ui32NewIPAddress == 0)
{
//
// There is no IP address, so indicate that the DHCP process is
// running.
//
UARTprintf("Waiting for IP address.\n");
}
else
{
//
// Display the new IP address.
//
UARTprintf("IP Address: ");
DisplayIPAddress(ui32NewIPAddress);
UARTprintf("\nEcho Server is ready.\n");
}
//
// Save the new IP address.
//
g_ui32IPAddress = ui32NewIPAddress;
}
//
// If there is not an IP address.
//
if((ui32NewIPAddress == 0) || (ui32NewIPAddress == 0xffffffff))
{
//
// Do nothing and keep waiting.
//
}
}
//*****************************************************************************
//
// The interrupt handler for the SysTick interrupt.
//
//*****************************************************************************
void
SysTickIntHandler(void)
{
//
// Call the lwIP timer handler.
//
lwIPTimer(SYSTICKMS);
//
// Tell the application to change the state of the LED (in other words
// blink).
//
g_bLED = true;
}
//*****************************************************************************
//
// Callback function to close the connection.
//
//*****************************************************************************
static void
CloseConn(struct tcp_pcb *pcb)
{
//
// NULL will be passed to all other callback functions.
//
tcp_arg(pcb, NULL);
//
// NULL callback for the PCB when data is sent.
//
tcp_sent(pcb, NULL);
//
// NULL callback for the PCB when data is received.
//
tcp_recv(pcb, NULL);
//
// Closes the connection held by the PCB.
//
tcp_close(pcb);
}
//*****************************************************************************
//
// Callback function to indicate the number of bytes that were acknowledged by
// last acknowledgment.
//
//*****************************************************************************
static err_t
EchoSent(void *arg, struct tcp_pcb *tpcb, u16_t len)
{
LWIP_UNUSED_ARG(arg);
//
// Set global flags and print a message in main() indicating the number of
// bytes that has been acknowledged by the remote host.
//
g_scbFlag.EchoSent = 1;
g_scbFlag.len = len;
return ERR_OK;
}
//*****************************************************************************
//
// Callback function to process the received data from the client.
//
//*****************************************************************************
static err_t
EchoRecv( void *arg, struct tcp_pcb *pcb, struct pbuf *p, err_t err)
{
uint32_t ui32index;
uint32_t ui32len;
char *pcpayLoad;
char pcheaderMsg[45];
uint32_t ui32statuslen;
//
// Clear the Idle time counter.
//
g_ui32tcpPollTick = 0;
if (err == ERR_OK && p != NULL)
{
//
// tcp_recved must be called when the application has processed the
// data and is prepared to receive more.
//
tcp_recved(pcb, p->tot_len);
//
// Obtain the payload length and the pointer to the payload.
//
pcpayLoad = (char *)p->payload;
ui32len = p->tot_len;
usprintf(pcheaderMsg, "Server received %d bytes. "
"Converting character case.\n", ui32len);
//
// What will be echoed back to the host will contain a header message
// and the received payload from the TCP. The received payload will
// be processed to convert its case from upper to lower case and vice
// versa. Both the header message and the received TCP data will
// first be stored in the buffer before processing.
//
//
// First, find out the length of the header message that will be
// prepended before echoing back the received data from the
// host.
//
ui32statuslen = strlen(pcheaderMsg);
//
// Store the TCP payload after the header message to the buffer.
//
for( ui32index = 0; ui32index < ui32statuslen; ui32index++ )
{
g_pctcpBuffer[ui32index] = pcheaderMsg[ui32index];
}
//
// Copy the received payload to a buffer for processing.
//
for(ui32index = ui32statuslen;
ui32index < (ui32len + ui32statuslen);
ui32index++)
{
//
// Is this a lower case character?
//
if((pcpayLoad[ui32index-ui32statuslen] >= 'a') &&
(pcpayLoad[ui32index-ui32statuslen] <= 'z'))
{
//
// Convert to upper case.
//
g_pctcpBuffer[ui32index] =
(pcpayLoad[ui32index-ui32statuslen] - 'a') + 'A';
}
else
{
//
// Is this an upper case character?
//
if((pcpayLoad[ui32index-ui32statuslen] >= 'A') &&
(pcpayLoad[ui32index-ui32statuslen] <= 'Z'))
{
//
// Convert to lower case.
//
g_pctcpBuffer[ui32index] =
(pcpayLoad[ui32index-ui32statuslen] - 'Z') + 'z';
}
else
{
//
// Copy the received character to the transmit buffer.
//
g_pctcpBuffer[ui32index] =
pcpayLoad[ui32index-ui32statuslen];
}
}
}
//
// Dereference a pbuf chain.
//
pbuf_free(p);
//
// Call tcp_sndbuf() to find the maximum amount of data that can be
// sent.
//
if(ui32len > tcp_sndbuf(pcb))
ui32len = tcp_sndbuf(pcb);
//
// Enqueues the data stored in g_pctcpBuffer. The length of the data
// is passed in ui32len. The argument copy may be either 0 or 1 and
// indicates whether the new memory should be allocated for the data to
// be copied into. If the argument is 0, no new memory should be
// allocated and the data should only be referenced by pointer.
//
tcp_write(pcb, g_pctcpBuffer, ui32len+ui32statuslen, 0);
//
// Specifies the callback function EchoSent be called when data has
// successfully been received (i.e. acknowledged) by the remote host.
// The len argument passed to the sent callback function gives the
// number of bytes that were acknowledged by the last acknowledgment.
//
tcp_sent(pcb, EchoSent);
}
else
{
//
// If there is an error during pbuf allocation then free the pbuf.
//
pbuf_free(p);
}
//
// If the remote host requests a connection close with p == NULL then
// close the connection held by the PCB.
//
if(err == ERR_OK && p == NULL)
{
CloseConn(pcb);
}
return ERR_OK;
}
//*****************************************************************************
//
// Callback function for tcp_poll when the connection is idle.
//
//*****************************************************************************
static err_t
EchoPoll(void *arg, struct tcp_pcb *tpcb)
{
LWIP_UNUSED_ARG(arg);
//
// Each time the EchoPoll is entered it means the connection
// has been idle for 5 seconds.
//
g_ui32tcpPollTick++;
//
// Set global and flag and print a message in main() indicating the
// duration the connection has been idle.
//
g_scbFlag.EchoPoll = 1;
return ERR_OK;
}
//*****************************************************************************
//
// Callback function for tcp_accept when a new connection arrives.
//
//*****************************************************************************
static err_t
EchoAccept(void *arg, struct tcp_pcb *pcb, err_t err)
{
LWIP_UNUSED_ARG(arg);
LWIP_UNUSED_ARG(err);
// Set TCP connection to low priority
tcp_setprio(pcb, TCP_PRIO_MIN);
//
// Sets the callback function - EchoRecv that will be called when new
// data arrives on the connection associated with PCB. The callback
// function will be passed a NULL pbuf to indicate that the remote host
// has closed the connection.
//
tcp_recv(pcb, EchoRecv);
//
// Error callback function currently not implemented.
//
tcp_err(pcb, NULL);
//
// Specifies the polling interval and the callback function that should be
// called to poll the application. The interval is specified in number of
// TCP coarse grained timer shots, which occurs twice a second. An interval
// of 10 means that the application would be polled every 5 seconds.
//
tcp_poll(pcb, EchoPoll, 10);
return ERR_OK;
}
//*****************************************************************************
//
// Create a new TCP connection on telenet port 23 and bind it any IP addressed
// acquired by the DHCP server.
//
//*****************************************************************************
void
EchoInit(void)
{
struct tcp_pcb *tcp_pcb;
//
// Creates a new TCP connection identifier (PCB).
//
tcp_pcb = tcp_new();
//
// Bind the PCB to all local IP addresses at port 23.
//
tcp_bind(tcp_pcb, IP_ADDR_ANY, PORT);
//
// Start listening for incoming connections. tcp_listen()
// returns a new connection identifier and the one passed as
// an argument to the function will be deallocated.
//
tcp_pcb = tcp_listen(tcp_pcb);
//
// Specify the callback function - EchoAccept that should be
// called when a new connection arrives for a listening PCB.
//
tcp_accept(tcp_pcb, EchoAccept);
}
//*****************************************************************************
//
// This example demonstrates the use of the Ethernet Controller.
//
//*****************************************************************************
int
main(void)
{
uint32_t ui32User0, ui32User1;
uint8_t pui8MACArray[8];
//
// Make sure the main oscillator is enabled because this is required by
// the PHY. The system must have a 25MHz crystal attached to the OSC
// pins. The SYSCTL_MOSC_HIGHFREQ parameter is used when the crystal
// frequency is 10MHz or higher.
//
MAP_SysCtlMOSCConfigSet(SYSCTL_MOSC_HIGHFREQ);
//
// Run from the PLL at 120 MHz.
// Note: SYSCTL_CFG_VCO_240 is a new setting provided in TivaWare 2.2.x and
// later to better reflect the actual VCO speed due to SYSCTL#22.
//
g_ui32SysClock = MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN |
SYSCTL_USE_PLL |
SYSCTL_CFG_VCO_240), 120000000);
//
// Configure the device pins.
//
PinoutSet(true, false);
//
// Initialize the UART and write initial status.
//
UARTStdioConfig(0, 115200, g_ui32SysClock);
UARTprintf("\033[2J\033[H");
UARTprintf("Ethernet lwIP TCP echo example.\n\n");
//
// Configure Port N1 for as an output for the animation LED.
//
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_1);
//
// Initialize LED to OFF (0).
//
MAP_GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_1, ~GPIO_PIN_1);
//
// Configure SysTick for a periodic interrupt.
//
MAP_SysTickPeriodSet(g_ui32SysClock / SYSTICKHZ);
MAP_SysTickEnable();
MAP_SysTickIntEnable();
//
// Configure the hardware MAC address for Ethernet Controller filtering of
// incoming packets. The MAC address will be stored in the non-volatile
// USER0 and USER1 registers.
//
MAP_FlashUserGet(&ui32User0, &ui32User1);
if((ui32User0 == 0xffffffff) || (ui32User1 == 0xffffffff))
{
//
// We should never get here. This is an error if the MAC address has
// not been programmed into the device. Exit the program.
// Let the user know there is no MAC address.
//
UARTprintf("No MAC programmed!\n");
while(1)
{
}
}
//
// Tell the user what we are waiting for.
//
UARTprintf("Waiting for IP.\n");
//
// Convert the 24/24 split MAC address from NV ram into a 32/16 split MAC
// address needed to program the hardware registers, then program the MAC
// address into the Ethernet Controller registers.
//
pui8MACArray[0] = ((ui32User0 >> 0) & 0xff);
pui8MACArray[1] = ((ui32User0 >> 8) & 0xff);
pui8MACArray[2] = ((ui32User0 >> 16) & 0xff);
pui8MACArray[3] = ((ui32User1 >> 0) & 0xff);
pui8MACArray[4] = ((ui32User1 >> 8) & 0xff);
pui8MACArray[5] = ((ui32User1 >> 16) & 0xff);
//
// Initialize the lwIP library, using DHCP.
//
lwIPInit(g_ui32SysClock, pui8MACArray, 0, 0, 0, IPADDR_USE_DHCP);
//
// Initialize the Echo Server.
//
EchoInit();
//
// Set the interrupt priorities. We set the SysTick interrupt to a higher
// priority than the Ethernet interrupt to ensure that the file system
// tick is processed if SysTick occurs while the Ethernet handler is being
// processed. This is very likely since all the TCP/IP and HTTP work is
// done in the context of the Ethernet interrupt.
//
MAP_IntPrioritySet(INT_EMAC0, ETHERNET_INT_PRIORITY);
MAP_IntPrioritySet(FAULT_SYSTICK, SYSTICK_INT_PRIORITY);
//
// Loop forever, processing the LED blinking. All the work is done in
// interrupt handlers.
//
while(1)
{
if (g_scbFlag.EchoSent == 1)
{
g_scbFlag.EchoSent = 0;
UARTprintf("\rBytes acknowledged by the remote host:%4d", g_scbFlag.len);
}
if (g_scbFlag.EchoPoll == 1)
{
g_scbFlag.EchoPoll = 0;
UARTprintf("\rConnection has been idle for %4d seconds.",
g_ui32tcpPollTick*5);
}
if (g_bLED == 1)
{
//
// Clear the flag.
//
g_bLED = false;
//
// Toggle the LED.
//
MAP_GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_1,
(MAP_GPIOPinRead(GPIO_PORTN_BASE, GPIO_PIN_1) ^
GPIO_PIN_1));
SysCtlDelay(g_ui32SysClock / 3);
}
}
}
Please help me to resolve this issue.
Thanks,
Gaurav








