Part Number: BP-AM2BLDCSERVO
Other Parts Discussed in Thread: LP-AM243
Tool/software:
Dear TI Experts,
I have the LP-243x hooked up with BP-AM2BLDCSERVO, and connected two BLY342D-48V-3200 motors plus two EnDAT2.2 Encoders as described in TIDUF42, chapter 4.1.
As is, the SW projects don't spin the motors. As I understand the description in chapter 4.3, it should?
After trying several things, we found out that the R5FSS0-0 project "single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang" spins motor 1 when I #define BUILDLEVEL OPEN_LOOP_IQ_ID and #define USE_OPEN_LOOP_WITH_SDDF in settings.h
However I could not find any settings that would spin my motor 2 with the R5FSS0-1 core and the corresponding project for that core, not even in open loop mode.
Is the description inaccurate here or is this an issue with my setup? Are there some steps I can follow to narrow this down?
My SDK version: motor_control_sdk_am243x_09_02_00_09.
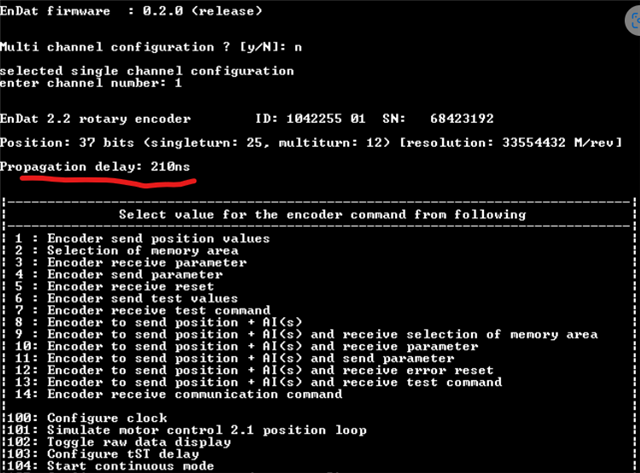
(side note: As encoders I use ROC-425 instead of ROQ-437, which is not capable of counting multi-turn but also implements EnDAT2.2.)
Thank you and regards,
Claus