Part Number: MSPM0G1106
Tool/software:
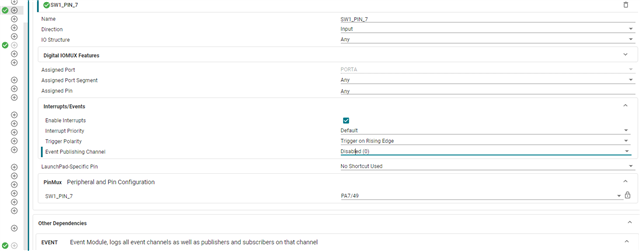
Hello, I made the following software and settings, checked the hardware, but it is not working, can you help?
#include <GPIO_Func.h>
#include "ti_msp_dl_config.h"
#define DELAY (160000000)
int val;
void GPIOA_IRQHandler(void) {
// Kesme işleyici fonksiyonu: Kesme gerçekleştiğinde bu fonksiyon çağrılır.
DL_GPIO_clearInterruptStatus(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN); // Kesme bayrağını temizle
DL_GPIO_setUpperPinsPolarity(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN);
//DL_GPIO_setLowerPinsPolarity(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN); // Yükselen kenar
Buzzer_ON;
val=1;
}
int main(void)
{
SYSCFG_DL_init();
//DL_GPIO_initDigitalInput(GPIO_A_SW1_PIN_7_PIN); // Port ve pin kombinasyonunu doğru yapılandırın
DL_GPIO_setInterrupt(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN);
//DL_GPIO_setUpperPinsPolarity(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN); // Yükselen kenar yapılandırması
DL_GPIO_enableInterrupt(GPIO_A_PORT, GPIO_A_SW1_PIN_7_PIN); // Kesmeyi etkinleştirin
// Kesme işleyicisini kaydet
NVIC_EnableIRQ(GPIOA_INT_IRQn);
val=0;
while (1) {
// toggle_gpio_pin();
}
}